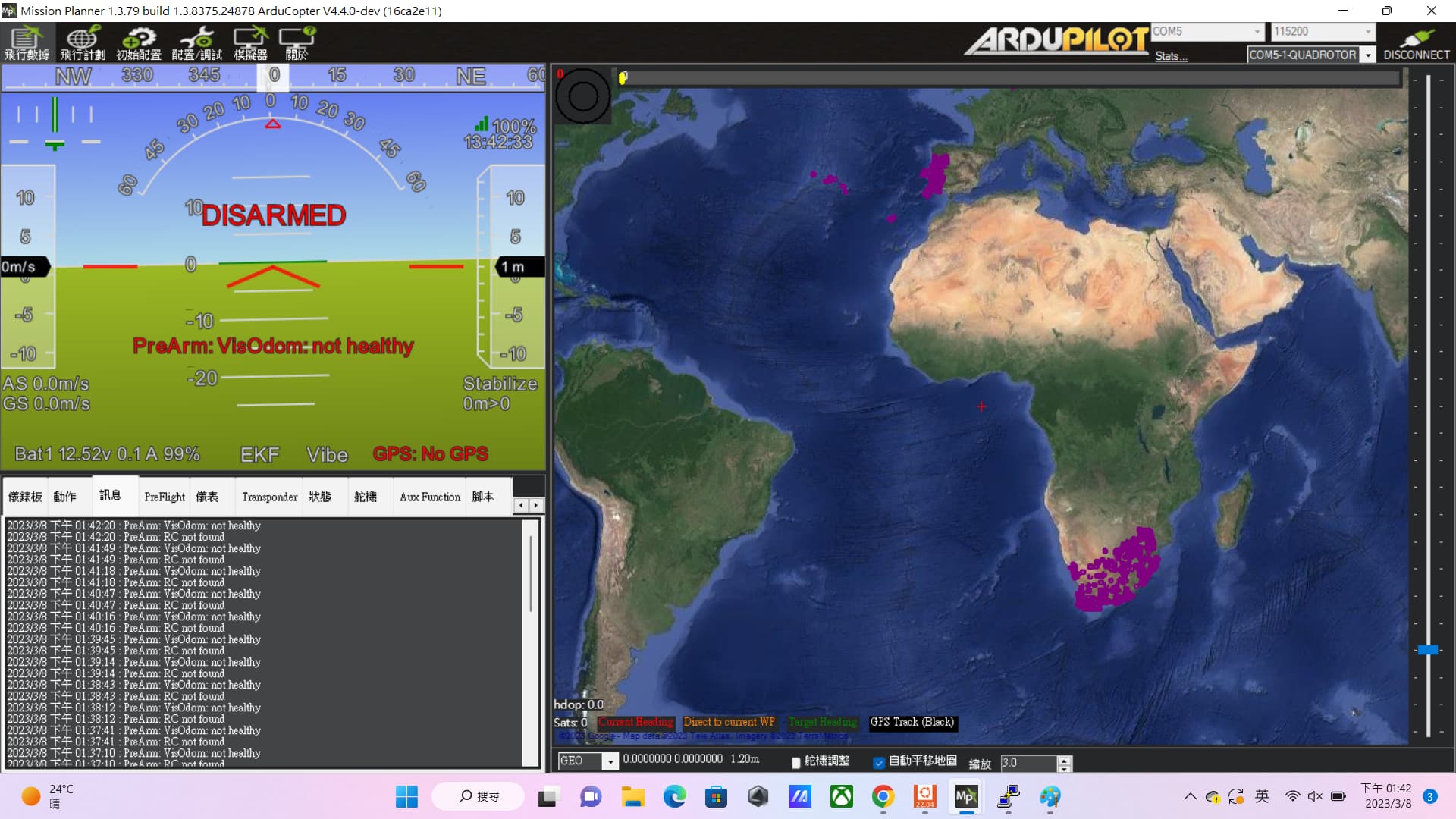
I suspect the issue is probably that the VOXL camera itself is not publishing the position estimates. If you temporarilyi set SERIAL2_OPTIONS = 0 (and restart the autopilot) and then connect with the ground station and open the MAVLink inspector I think you will find that the camera is not publishing the VISION_POSITION_ESTIMATE message.
… if this is the case then its not an AP problem but rather a VOXL camera issue and I don’t know what can be done really. Maybe the camera can be reset back to factory settings? My camera worked following the instructions linked from the AP wiki page you’ve linked above.
@rmackay9
Thank you for your reply~
Few days ago, l set SERIAL1_OPTIONS = 0 (VOXL connect t o Telem1), MP not publishing the VISION_POSITION_ESTIMATE message.
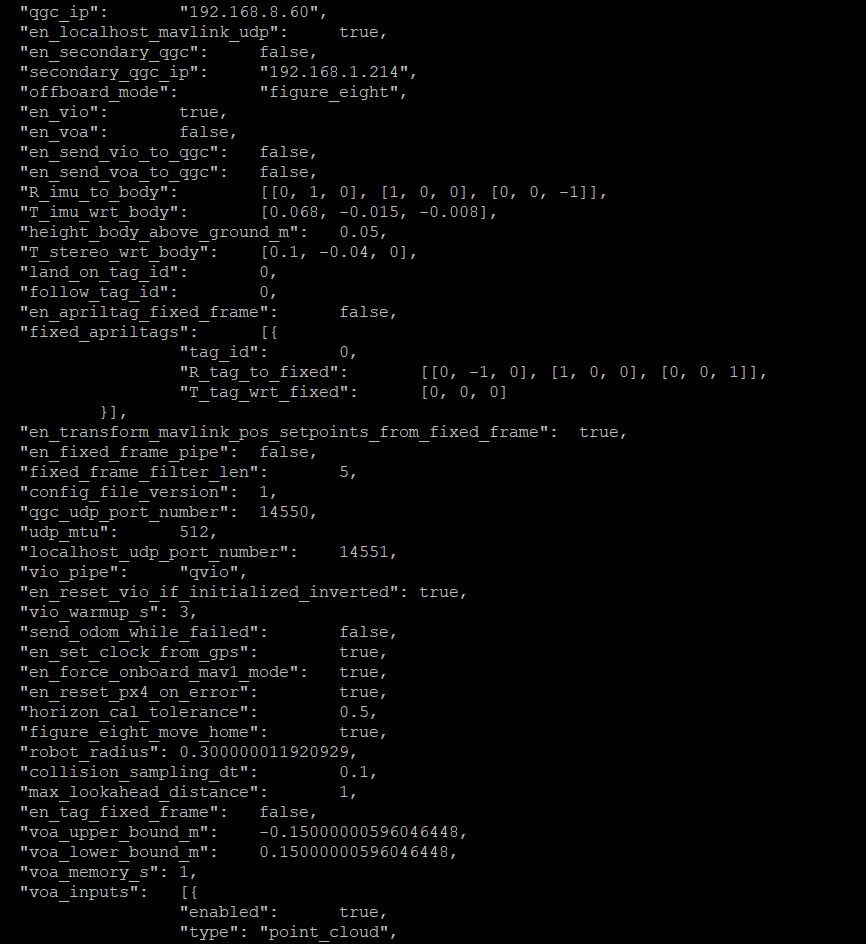
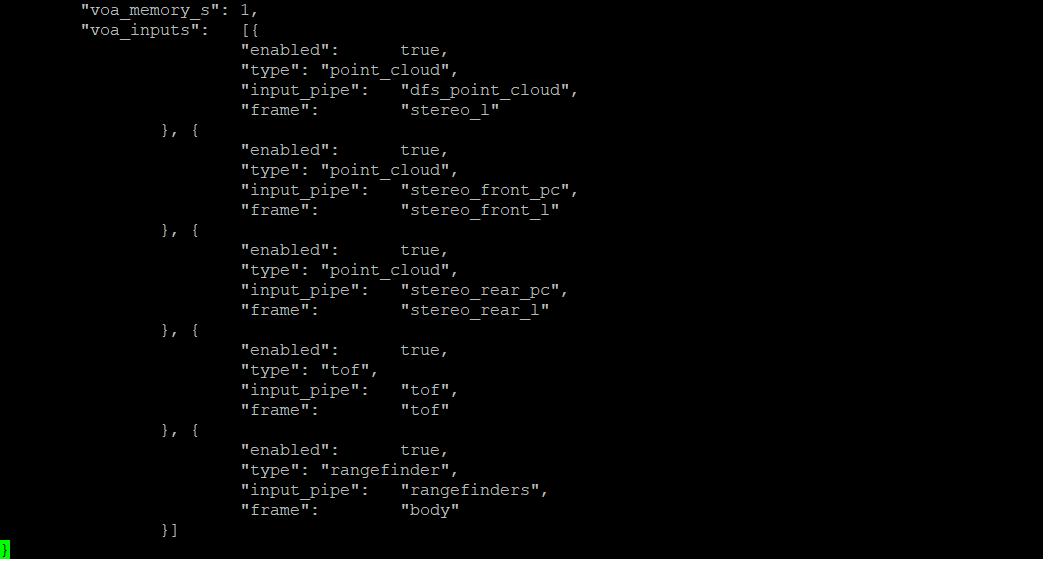
I will follow your suggestion, to check VOXL camera, Is it possible to provide your voxl-vision-px4.conf for me? Thanks
ok. I’m afraid I have lent my VOXL camera to someone else for a demonstration so I don’t have access to the voxl-vision-px4.conf file. It should be the default file though.
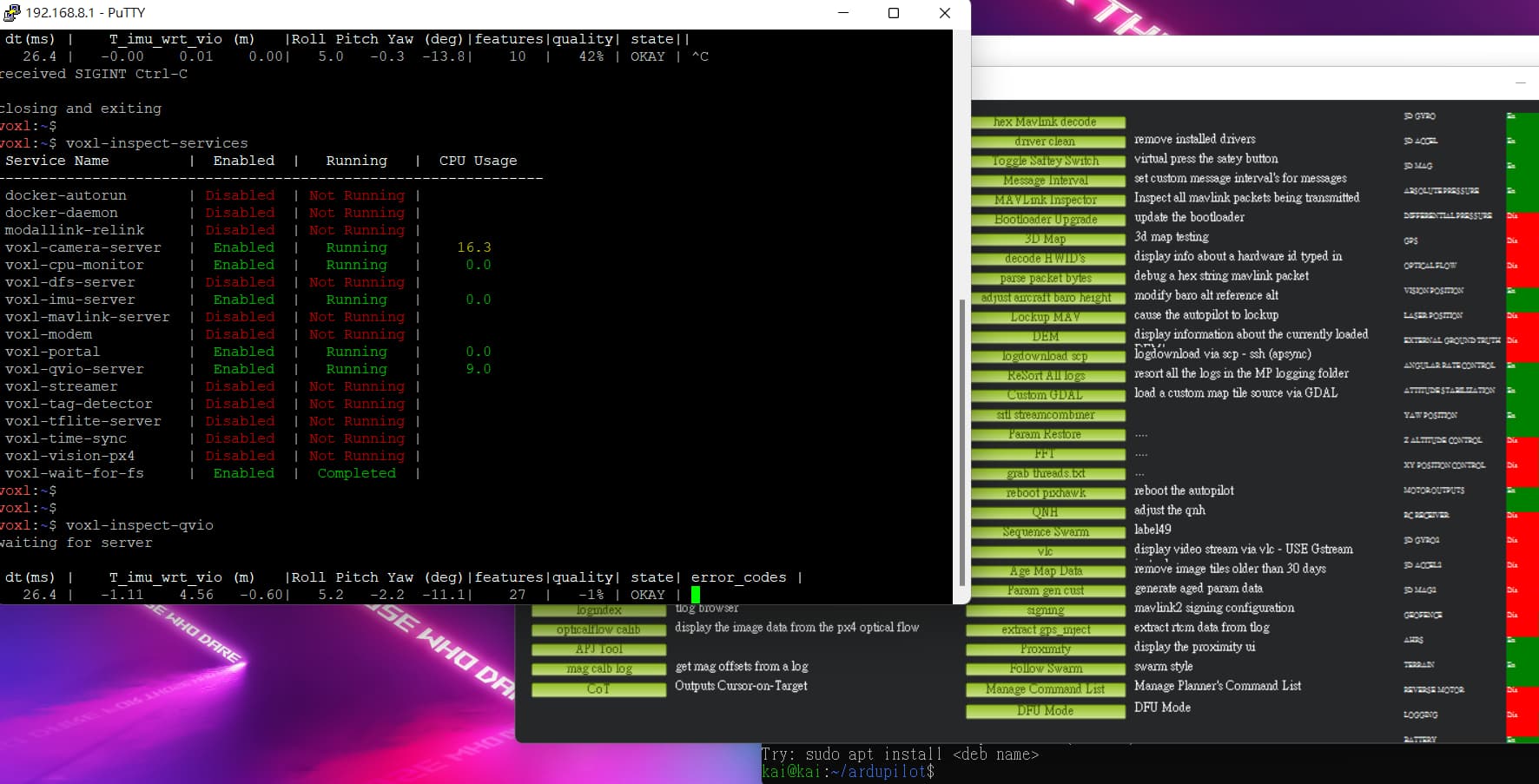
I think that we’ve figured out what the issue may be. For some reason it seems that the mavlink server is not starting automatically on the VOXL cameras. I’ve contacted ModalAI but no answer yet.
I’ve updated the wiki to add this line to the “VOXL Camera Configuration” instructions:
run “systemctl enable voxl-mavlink-server” to configure the mavlink server to start automatically