https://discuss.ardupilot.org/t/ship-landing-support/82772
Hello, will the Ship Landing Support project appear in version 4.4AC?
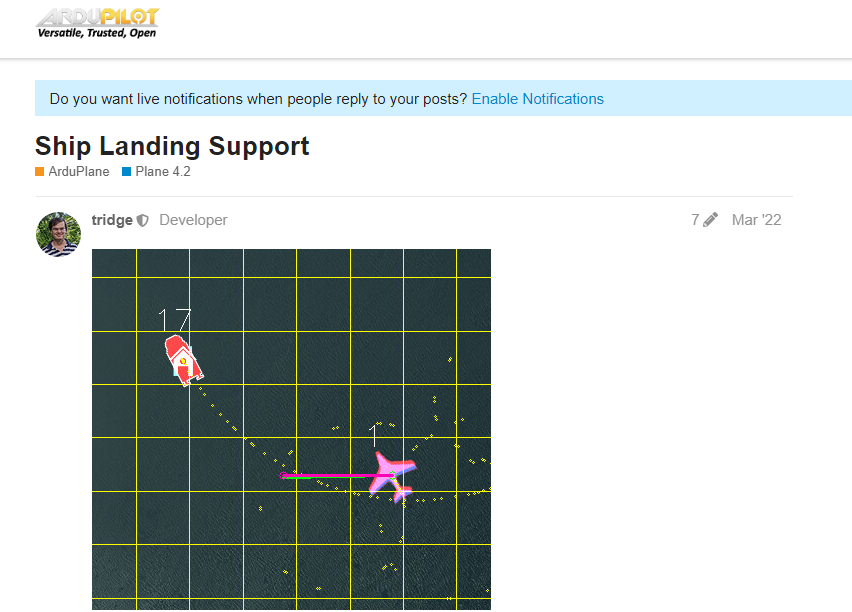
Looking forward to the multi-rotor mobile platform landing test
https://discuss.ardupilot.org/t/ship-landing-support/82772
Hello, will the Ship Landing Support project appear in version 4.4AC?
Looking forward to the multi-rotor mobile platform landing test