Copter-4.3.4-rc1 is now available for beta testing using MP or QGC’s “beta firmwares” link. Alternatively it can be directly downloaded from firmware.ardupilot.org.
Changes vs 4.3.3 are in the ReleaseNotes and copied below.
AutoPilot specific enhancements
a) CubeOrangePlusBG support
b) Foxeer ReaperF745 supports external compass
c) MambaH743v4 supports VTX power
Precision landing option to resume tracking target after pilot repositioning
Bug fixes
a) Arming check fix for terrain following with rangefinder (failed if terrain db was disabled)
b) Arming check fix if BARO_FIELD_ELEV set
c) Compass calibration diagonals set to 1,1,1 if incorrectly set to 0,0,0
d) FFT notch tune feature disabled (will be re-released in 4.4)
e) Gimbal’s yaw feed-forward set to zero when landed (affects Gremsy gimbals)
f) IOMCU double reset and safety disable fix
g) Logging fix for duplicate format messages
h) OpenDroneId sets emergency status on crash or chute deploy
i) Peripheral firmware updates using MAVCAN fixed j) RC protocol cannot be changed once detected on boards with IOMCU
k) Surface tracking uses filtered and corrected rangefinder values
The most important fix is 3F (see bolded line above) which stops an RC protocol from changing once detected. There were two cases found in which the RC protocol changed to an incorrect protocol (the auto detection failed) in-flight which led to crashes. This issue is very rare and exists in older versions of AP as well.
Any testing and feedback is greatly appreciated! Just reply below with any issues or successes. Thanks!
I know some work has been done but I haven’t seen anything go into latest re ship landing for multicopters so I think it is unlikely to make it into the first release of 4.4.0 at least. In any case, I will ask @Leonardthall who is the main dev on this.
Thank you very much for your reply. The CUAV technicians have already conducted the landing test of the fixed-wing mobile platform. I am in communication with them. We are looking forward to the mobile platform landing test on the multi-rotor firmware.
Hi,Testing beta on a 260 gram quad and Yaapu is sensing as a failsafe battery two but battery two is not installed. Also I not sure why but the craft does not automatically disarm wondering if they are related by chance. I will look at my failsafe for bad setup on my end…
Hi Randy, I use this ver. in our big copter.
It’s work well. Bird flying as eagle.
But yestarday some strange happened.
We up it to 50m in Pos Hold and play whith camera on Herelink
Herelink and Airunit updated.
After 3-4 min of flight RC controller stop video (just paused last pic), no response for buttons.
After few sec I look at bird- it began roll and pitch untill 45 deg in different way and after 1-2 sec drope down at 45 deg.
After crash we check electronics and reconnect battaries and GCS. All work well.
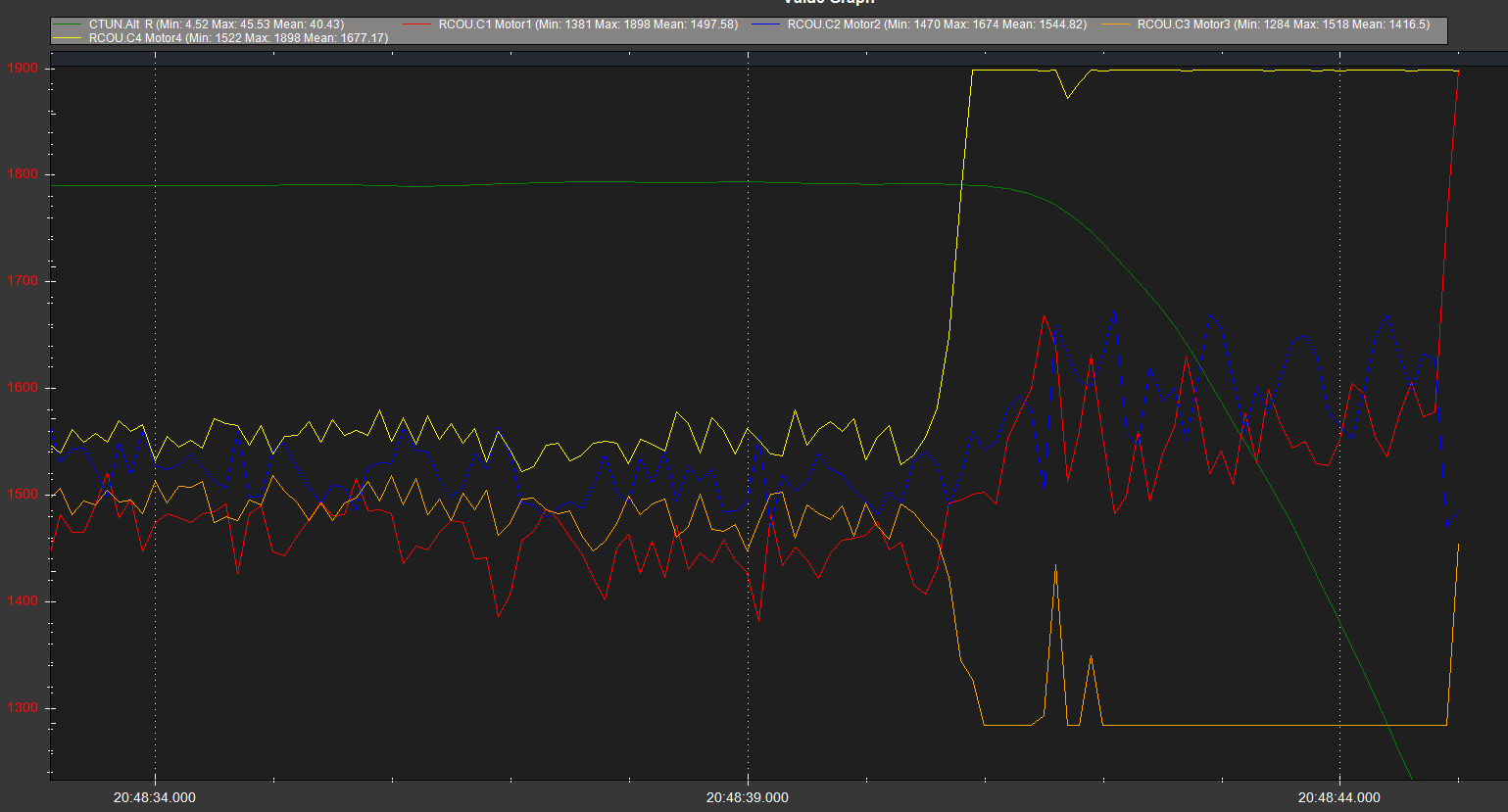
In LOG I found 3 strange things-
Mot 4 suddenly go to full throtlle, At same tine mot3 swithch off.
Mot 1and 2 increase thrust and resume work normal (look like mot4 lost ESC communication and stop) But in this case birt shoud roll and +- verticaly drope ?
Mav3 RX packets twise stop count. And second time when we lost RC and then bird.
RC1-RC4 works well untill drope begin. After bird takes pos we not touched sticks.
But last 1,5 sec we can see “thrash” in RC channels.
So who can help understand- what it was? In case of RC lost bird should make RTL. But RC not lost…
Here is LOG file.
It doesnt look related to the firmware version - although all flights, even crashes, can provide useful data.
Do you want to start your own discussion thread for this?
There’s some more tuning to be done when you get that copter back together, easy things to make worthwhile improvements.
Motor 4 loses thrust and is commanded to maximum, Motor 3 output is reduced to compensate.
Possibly a loss of ESC/motor sync, but I cant say why.