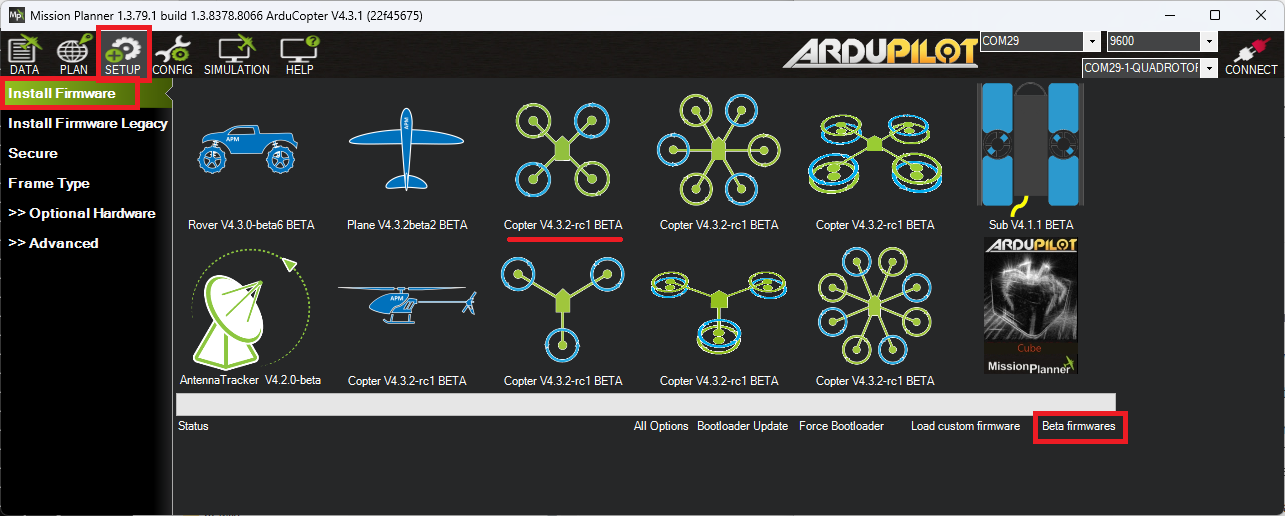
Copter-4.3.1-rc1 is now available for beta testing and can be installed using MP or QGC’s beta firmwares link or it can be manually downloaded from firmware.ardupilot.org.
Changes vs 4.3.0 are in the release notes and copied below
Autopilot specific enhancements
a) ARKV6X support
b) MatekH743 supports 8 bi-directional dshot channels
c) Pixhawk boards support MS5607 baros
d) SpeedbyBee F405v3 support
DroneCAN Airspeed sensor support including hygrometer (aka water vapour) readings
EFI support (electronic fuel injection engines)
Pre-arm warning if multiple UARTs with SERIALx_PROTOCOL = RCIN
Siyi gimbal support
Bug fixes
a) Arm check warning loses duplicate “AHRS” prefix
b) AtomRCF405NAVI bootloader file name fixed
c) BRD_SAFETY_MASK fixed on boards with both FMU safety switch and IOMCU
d) Compass calibration continues even if a single compass’s cal fails
e) Gremsy gimbal driver sends autopilot info at lower rate to save bandwidth
f) Invensense 42605 and 42609 IMUs use anti-aliasing filter and notch filter
g) Mode change to AUTOTUNE message shortened
h) OSD stats screen fix
i) RC input on serial port uses first UART with SERIALx_PROTOCOL = 23 (was using last)
j) RunCam caching fix with enablement and setup on 3-pos switch
k) RTK CAN GPS fix when GPSs conneted to separate CAN ports on autopilot
l) SkyViper GPS fix
m) Turtle mode safety fixes (e.g. can only enter Tutle mode with at zero throttle)
I just upgraded to 4.3.1-rc1 and flown several times. No issues noted. I find the throttle response on Stabilized and Acro became a bit more sensitive. Not a big drama. We’ll keep on testing and update this thread if I find something. Autotune message is already clear and not truncated. Thanks for fixing this.
I am quite new to these subject so sorry if my question seems dumb.
I am trying to download this version (Copter-4.3.1-rc1) on the link provided in the first post yet, I struggle to find it since the 4.3.2 has been released and seems to be the new reference going through MP beta firmwares or there : ArduPilot firmware : /Copter/beta/CubeOrange
Is there any other link that I missed which allow to download this previous version ?
Thanks very much for getting involved with Beta testing, we really appreciate it. For most people the easiest way to install the beta version is to use MP’s Install Firmware screen. If you click on the “Beta firmwares” label on the bottom right you should see the versions displayed below each icon update.
Hi all - I just installed 4.3.1 on a PixHawk quadcopter and now I cannot arm it - I consistently get "Arm: Baro: GPS alt error 5808m (see BARO_ALTERR_MAX).
FWIW: BARO_ALTERR_LMAX is set to 2000.0.
Other users have reported the same error on PixHawk starting in the last two weeks. The error always seem to be ~5800m.
It is a guess but I suspect what we are seeing is that some manufacturers have substituted the regular barometer chip for an alternative due to the chip shortage.
I’ll fish out a log - this PixHawk is one I’ve flown without issues for ~2 years (ie the hardware hasn’t changed). I’m not sure what firmware it had before today’s upgrade, probably 4.2 something.
Ensure you are using the Pixhawk1 firmware and not FMUv3, checking log now…
EDIT: yes, confirmed Pixhawk1 firmware, I cant tell what the barometer is though.
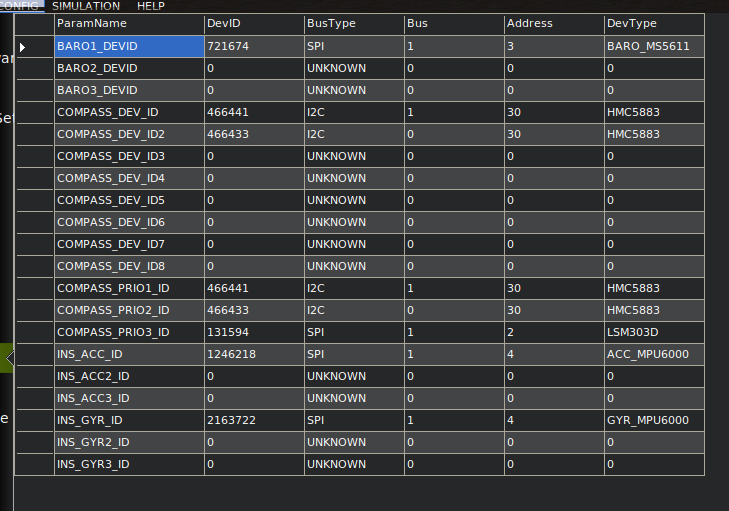
Have you got a screenshot of the HW ID section from MissionPlanner?
@Brodo@xfacta the log log_160_2022-12-24-08-35-06.bin shows an example of a Pixhawk1 where the vendor has substituted a MS5607 for the correct part which is a MS5611. Unfortunately the only difference between these two sensors is the pressure scaling - it is not possible to determine which part it is from just probing the sensor.
It is quite possible to fly for years with the wrong sensor and it will seem OK. It means the pressure scaling is wrong, so your flight altitude will track the desired altitude badly but for most users flying at low altitudes above home they may not notice.
We didn’t detect this until this release. In this release we check the pressure altitude against the GPS altitude and if the error is large enough (above BARO_ALTERR_MAX which defaults to 2000m) then we give the error you see.
PreArm: Baro: GPS alt error 5738m
The fix is to set BARO_OPTIONS=1, which forces the MS5611 to be treated as a MS5607. The error will go away and you will also find your height tracking in missions will be a lot better.
Thanks @tridge - just confirming this BARO_OPTIONS setting worked for me and I’m flying with 4.3.2.
Given the scaling of this device puts the reported altitude above 5000m, and most users will be below 5000m, perhaps this would be a reasonable heuristic to differentiate between the two devices at boot, unless the BARO_OPTIONS instructs otherwise?