After overcoming my severe allergy to Windows and remembering that I just had recently created virtual system using Windows 11 I’ve decided to try the MP-beta version on there.
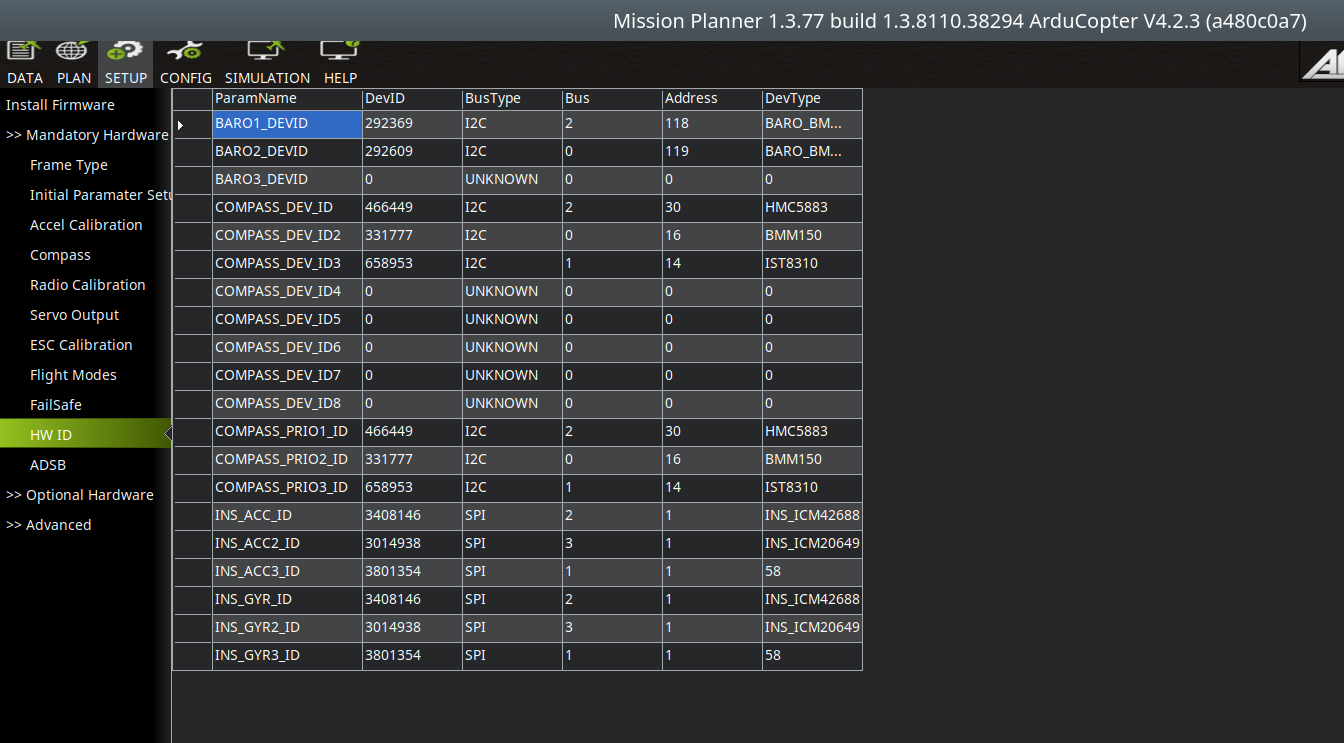
To my surprise on there all IMU’s are showing as on your earlier screenshot.
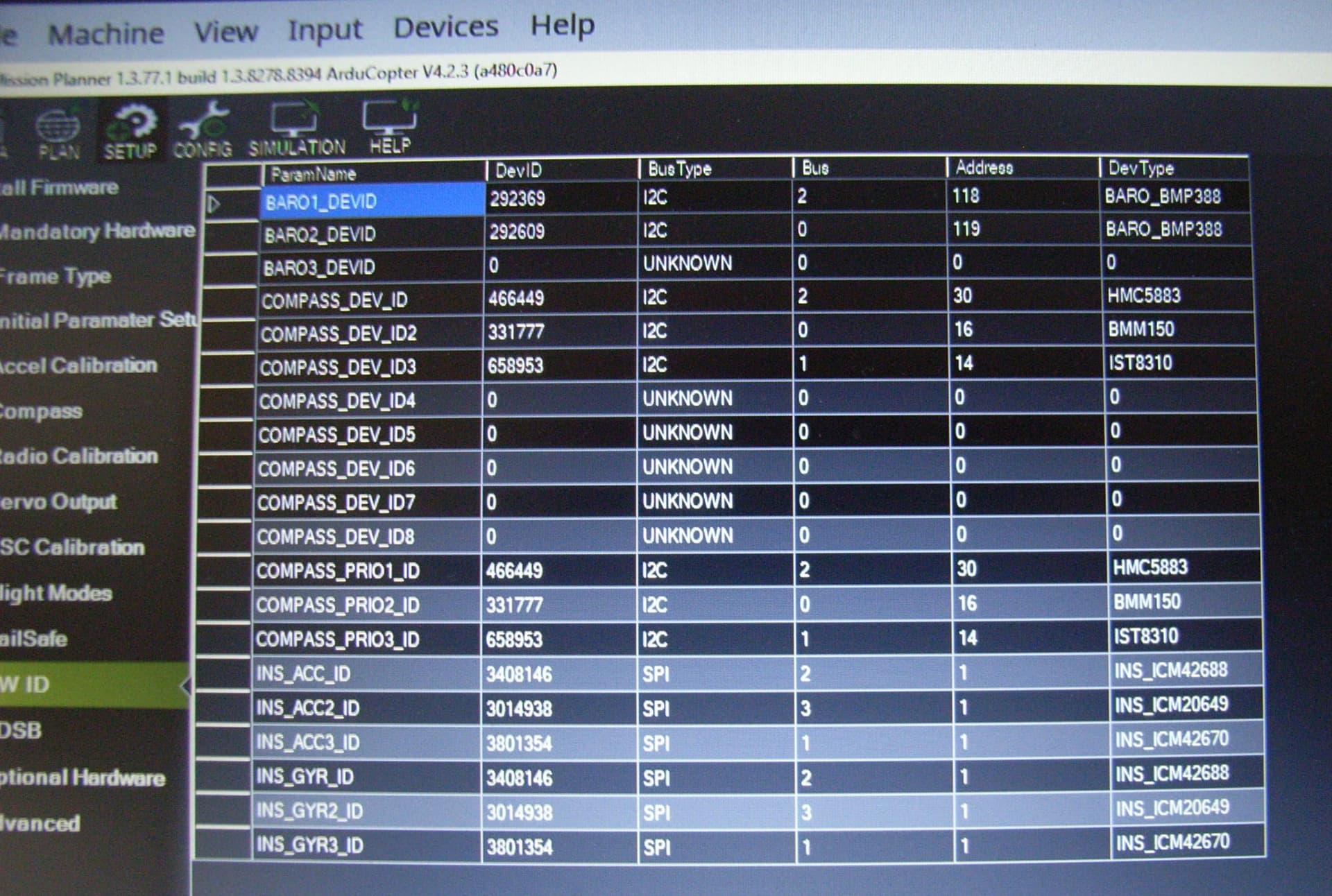
To make sure same issue is still there in MP on Ubuntu 20.04 I’ve checked and sure enough there it is showing up differently!
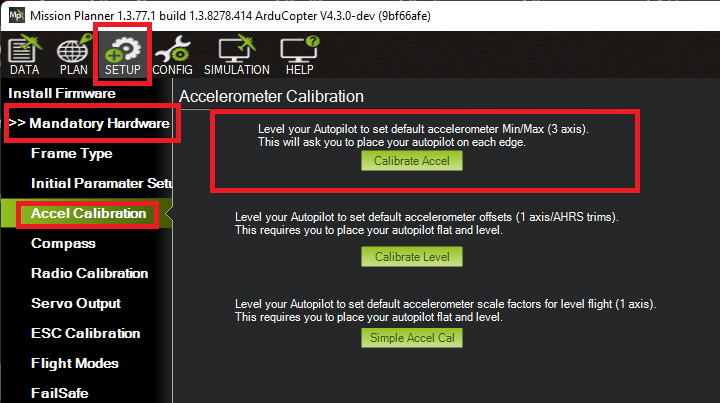
The only issue is now as was before that I can not successfully calibrate all sensors - keeps coming up with “calibration failed” on both MP and QGC on Ubuntu 20.04 but also using Windows 11.
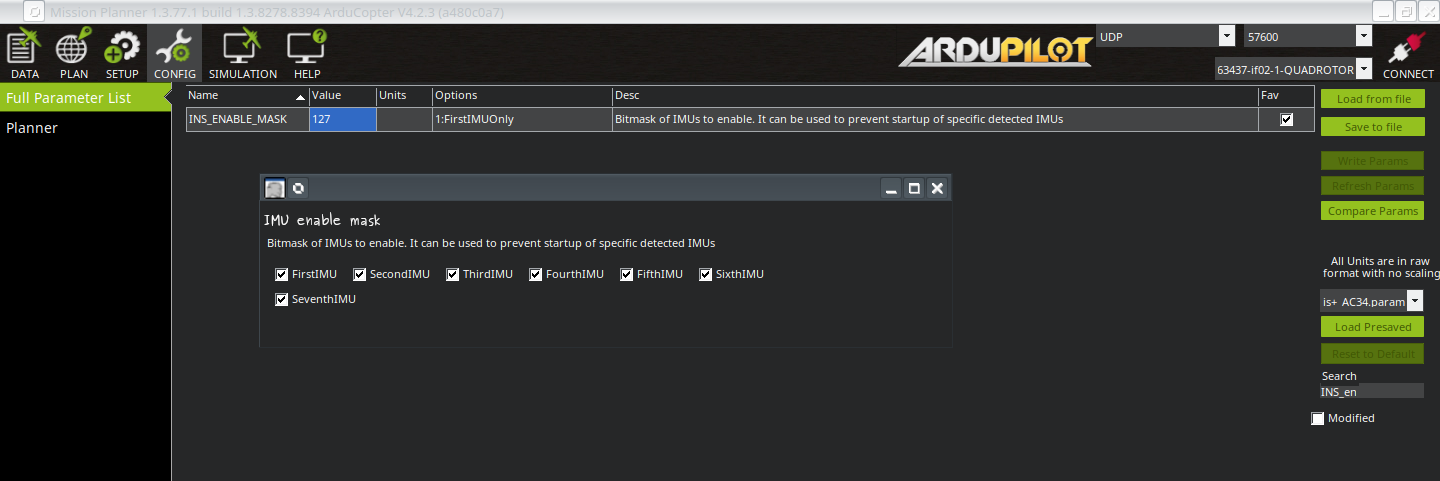
(Also still unable to enter “128” in the INS_ENABLED_MASK no matter what system I use)
OK, if INS_ENABLE_MASK is set to 127 and Copter-4.2.3 is on the board and the INS_ACC2/3_IDs are not showing up correctly then the issue is probably a hardware problem with the board.
Well, as in my earlier post, they are showing perfectly under MP in Windows11.
They are also working as earlier logs showing all 3 operational and providing data.
You wouldn’t believe it,…I tried it just an hour ago with MP on Ubuntu, QGC and MP on Windows11 → All calibration attempts failed. (MP was the beta from today)
Have also tried multiples times over the last few weeks and only success was by setting INS_ENABLE_MASK=115 or just the one active.
Now I’ve used the MP-stable again and suddenly it worked, despite failing always in the past.
After installing copter 4.2.3, I could not calibrate the esc, and when the gps compass engine calibration is started, the engine does not rotate even though I give the gas.
I am also having problems with ESC calibration (or something) on my Pixhawk 6x. I has been working when I first downloaded 4.2.3 a few weeks ago and preivously worked with Px4 build it was delivered with. I did experiment a bit with changing receiver and all of sudden I was required to do all this calibration again. Anyway, I seem to have managed to calibrate radio (all channel indicators move with the tx inputs), sensors and I am into ESC calibration. There is this random serie of beeps from controller and ESCs but I am after that never manage to arm my quad. I have tried with both MP and QGroundcontrol.
My quad is an X500 ARF kit (all Holybro products) so I really expect this collection of crap to SIMPLY WORK without the need for too much fiddling but it doesn’t. Can someone give advice.
If you get that to work (or not) start a thread of your own and provide a .bin log file.
If you’re not getting to flight tests you can set LOG_DISARMED,1 for a while then set LOG_DISARMED,0
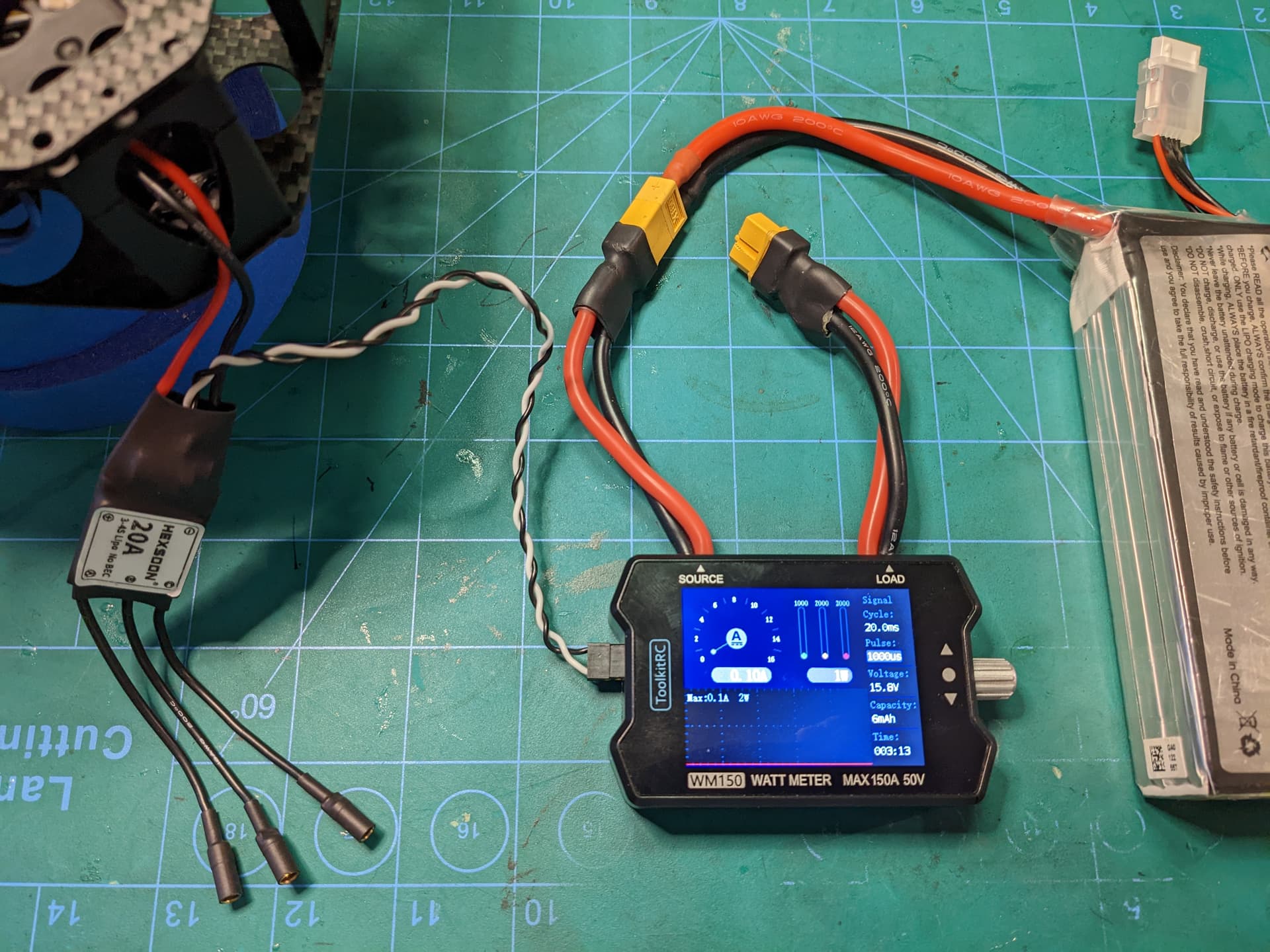
If the ESC’s are the type that require the throttle settings to configure them, you may find it easier to use an external gizmo that generates PWM. I have a watt-meter that includes a servo connector, and a knob that allows me to change the PWM from 2000 to 1000. It works great for calibrating T-Motor Air ESC’s and Hobby Wing ESC - seems many work the same way.
The trouble with calibrating ESCs using an external device or receiver is:
PWM from each device and the flight controller are all slightly different due to oscillator and clock frequencies all being slightly different.
This is the very reason for ESC calibration - to align the ESC PWM with the Flight Controller PWM so that 1500PWM from FC means 1500PWM to the ESC.
Often there may be no great difference and it would seem like the ESCs are now calibrated and working OK, but technically they are not calibrated to the Flight Controller.
The ESC calibration methods provided by Ardupilot firmware should be used, I’ve always used the semi-auto method successfully.
The only reason I can think of for it failing is if the RC Calibration is not done, or MOT_PWM_MAX and MOT_PWM_MIN are not set correctly, or outside the range expected by the ESCs.
(The ESC calibration methods provided by the Ardupilot software should be used, I have always used the semi-automatic method successfully.) This feature does not work regularly after 4.1.5. I use cuav nora. I can’t calibrate the PWM Range esc. How to fix bug in version.
I’m still having those issues with the 3rd. Accelerometer calibration as already mentioned in the beta release. (on Pixhawk 6X)
Still having the third Sensor disabled because of that.
However, I did notice the PX4 Team picking up on that exact problem as mentioned here:
Has there been any development in that regards?
Thanks