While doing the motor test from the optional tab on the setup page the motors are suddenly stopping and going into a long beep sequence. While in the field when tried to arm the copter same thing esc making the arming sequence beep again and again.
It would be worth trying SERVO_DSHOT_ESC=2 to see if that timing makes any difference. I suspect the holybro will work as I have tested loads of those on different boards. Might have to get an xrotor
I also want to know whether I have faced a dysnc on the same motor out on a setup with two different esc and after 2-3min into the flight motors 2 and 3 suddenly stop working properly and this happens even are switching to different esc. Now I have switched to a different Fc and Motors will do the test flight.
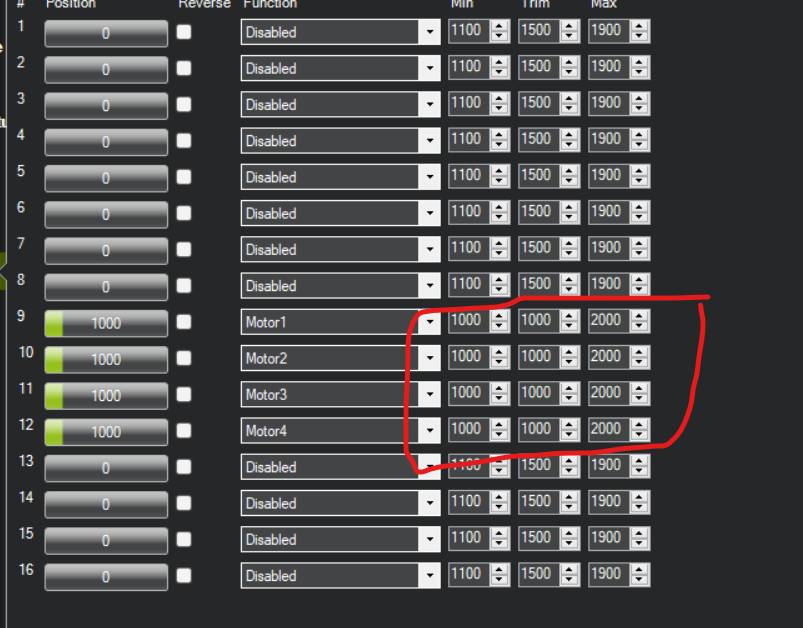
Mine is analogue motors, all show 1100, 1500, 1900, but my MOT_PWM_MIN/MAx is equal to RC3_MIN/MAX. just did a test flight, and the behaviour is the same as last time, both test flight and lab motor test. Without MOT_PWM_MIN/MAX, prearm-check fail and can’t arm.
if I set MOT_PWM_MIN/MAX to 1000 and 2000, the behaviour of the motor test is different from last time.
For CubeBlack, upgrade from 4.1.5, the MOT_PWM_MIN/MAX were automatically copied from RC3_MIN/MAX.
I think perhaps you have a config error here. On the cubeorange to use dshot you have to connect to AUX1-6 and use SERVO_BLH_* to configure the output type. So for instance: