I am curious did you change the default value of EK3_RNG_M_NSE, EK3_RNG_I_GATE, EK3_RNG_USE_SPD, EK3_ALT_M_NSE, RNGFND_FILT?
for non GPS install case, do you recommend setting EK3_RNG_USE_HGT?
I experience a holding height issue during pitch and roll with Hereflow + LW20 in 4.0.7 Ardupilot using EK2. our workaround under EK2, 4.0.7
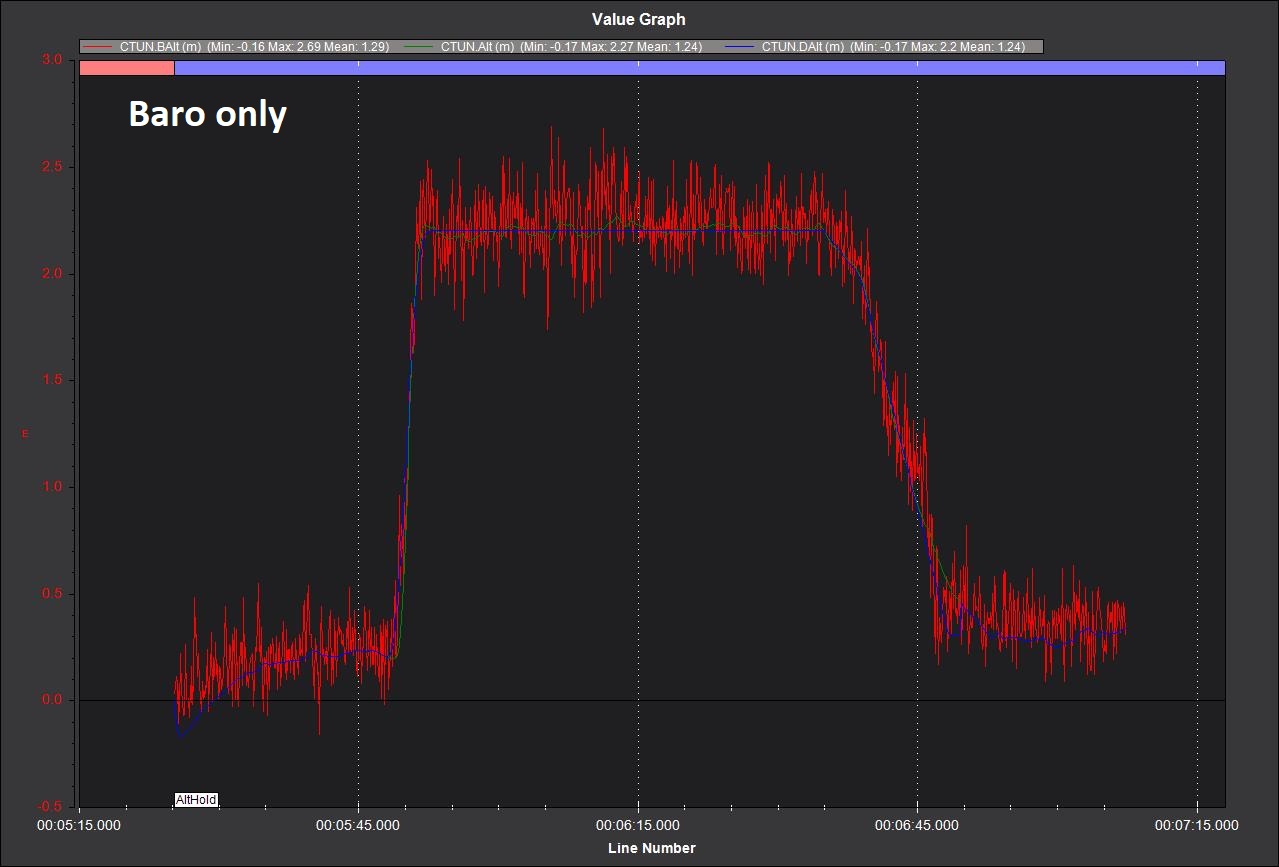
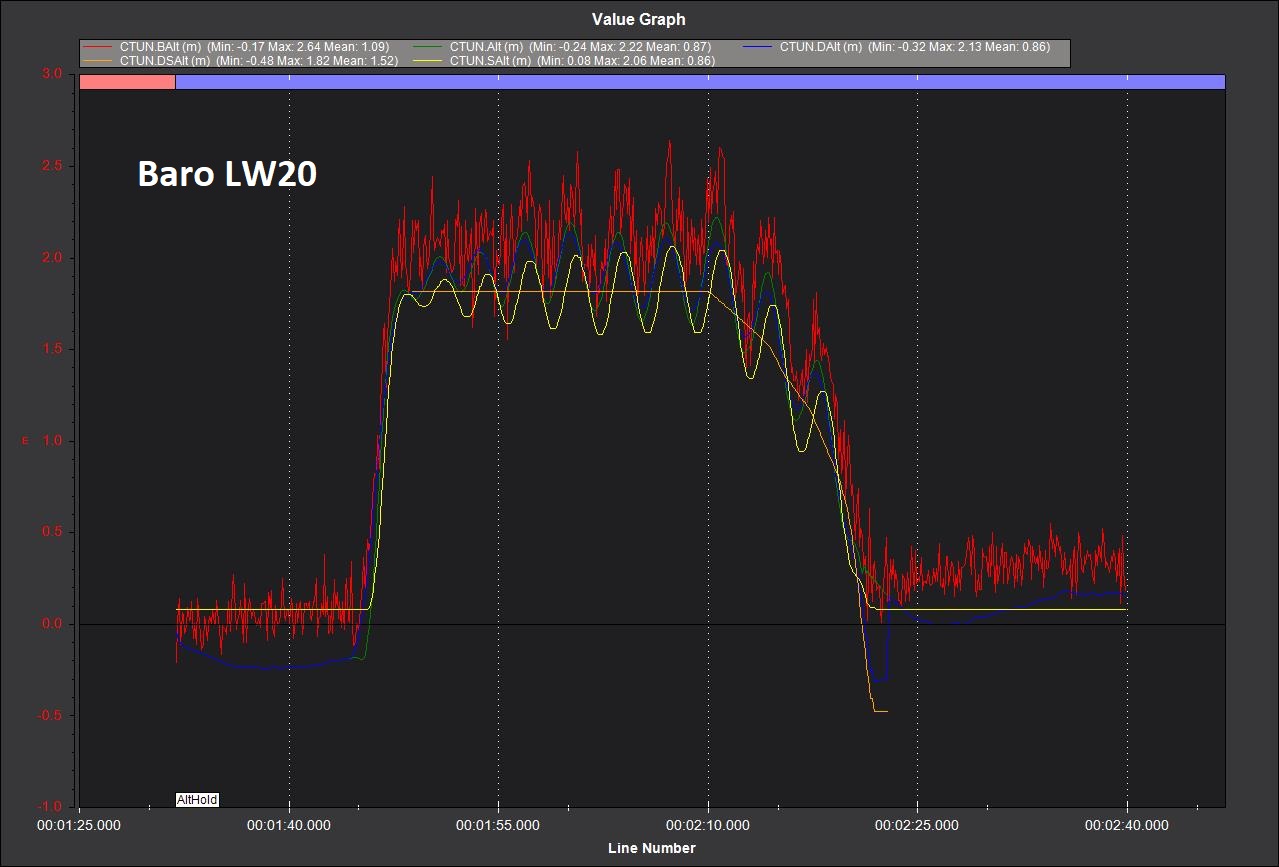
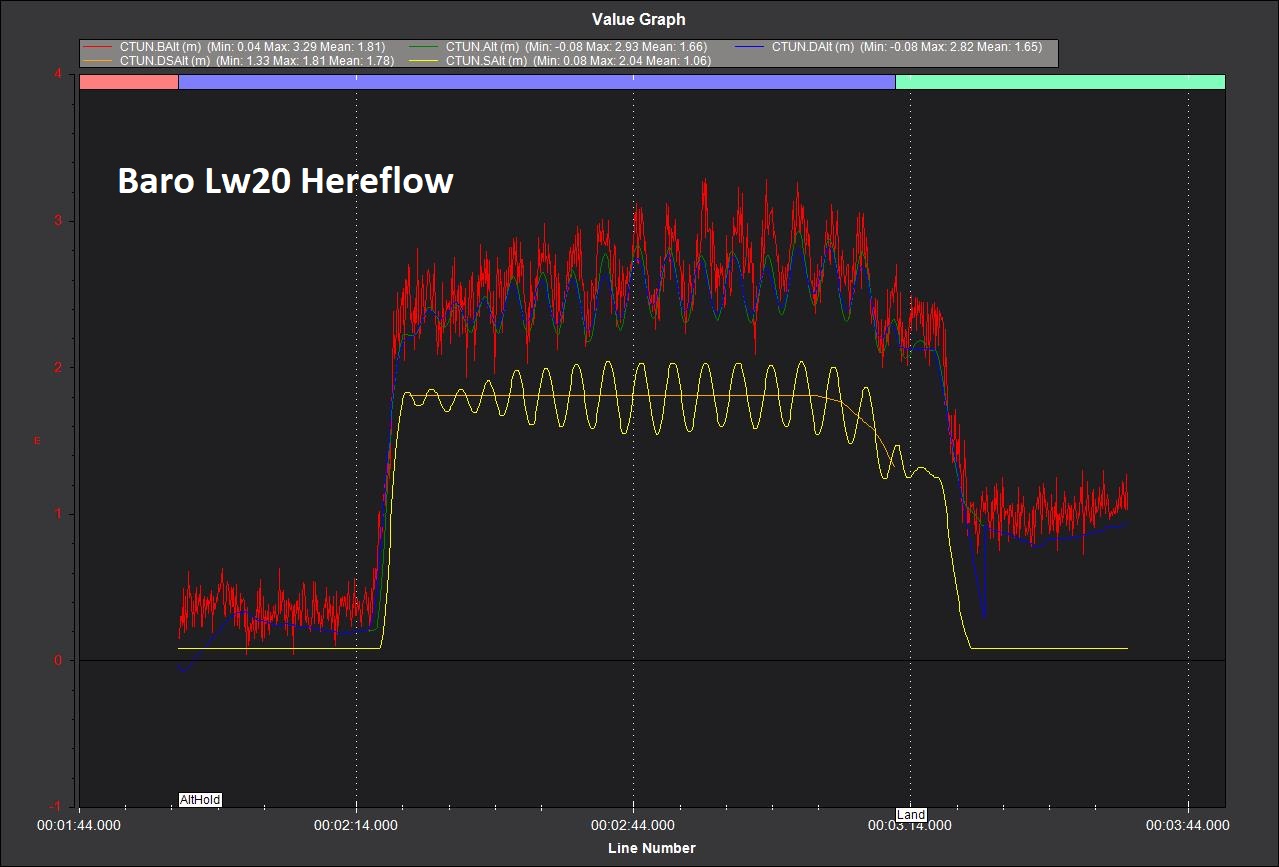
After a few flights with 4.1.5 & 4.1.4 (EK3), I still experience a holding height issue (Hereflow+ LW20) at Alt-hold flight mode. Not Sure is it due to settings. Turn OFF Hereflow and LW20, just use built-in baro, holding height is reasonable. Turn off Hereflow and turn ON LW20 also experience hover oscillation. All flights are without GPS installed and fly indoor (logs). I notice XKF1->n->PD is oscillating when LW20 is enabled, not in baro case.
Do I have to make all EK3_SRCx_POSZ to RangeFinder?
How critical for my case without GPS installed (AHRS_GPS_USE, currently is 1 - enabled)?
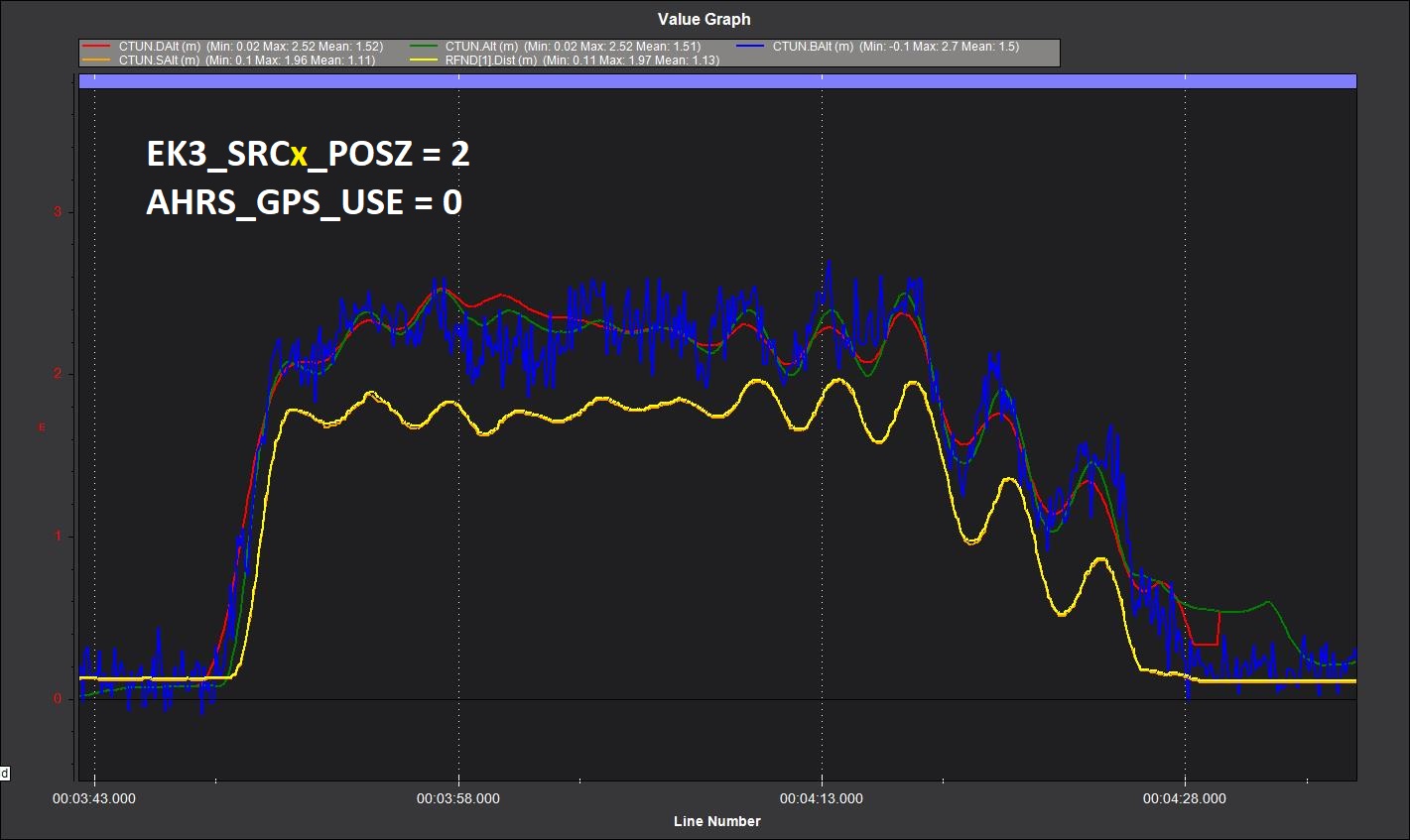
I have tested EK3_SRCx_POSZ set all to 2 (Rangefinder), and AHRS_GPS_USE to 0, very slight improvement but still bounce inflight.