Copter-4.1.3-rc1 has been released for beta testing and can be downloaded using MP or QGC’s beta firmwares link or it can be downloaded directly from firmware.ardupilot.org.
Changes vs 4.1.2 are in the ReleaseNotes and copied below:
Enhancements:
a) CUAV-X7 servo voltage detection support
Bug fixes
a) Main loop delay fix for boards with 16 bit timers (affects KakuteF4, MatekH743, MatekF405, MatekF765, SpeedybeeF4)
b) MOT_MIX_MAX constrained between 0.1 and 4.0 (would previously reset to 0.5 if set too high or low)
c) Polygon Fence upload fix when replacing the fence with one that has fewer points
d) TradHeli fix for missions which continue after a Land command
I know it’s hard to get too excited about these little beta releases but any feedback on testing whether positive or negative is greatly appreciated!
By the way, this release makes Copter consistent with Plane-4.1.5.
Hi @rmackay9
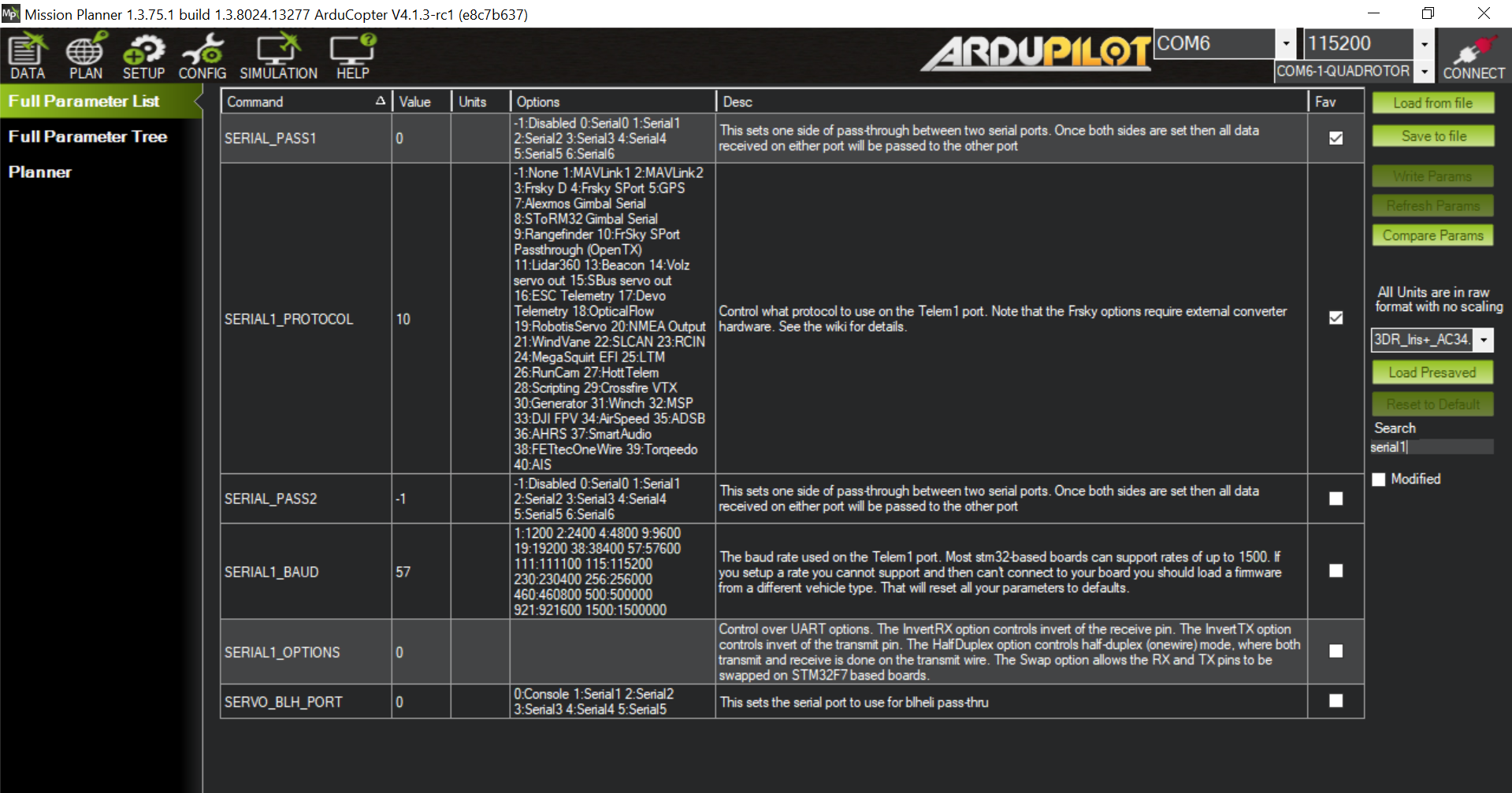
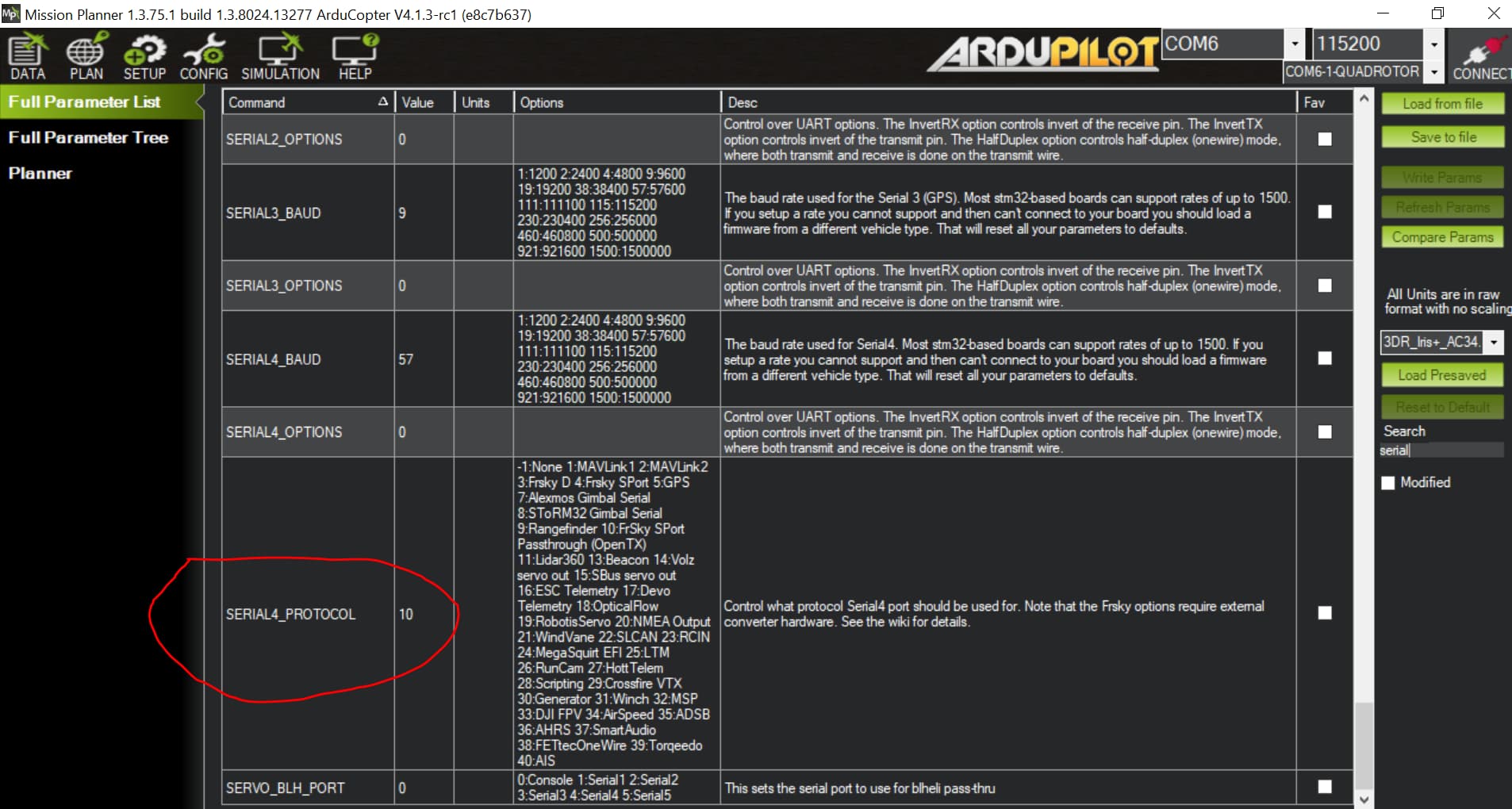
The yaapu script (latest version 1.95) still doesn’t work. Furthermore, passing from 4.0.5 (working yaapu) to 4.1.3, a serial 4 appears that did not exist in 4.0.5, even if the BRD_ALT_CONFIG parameter is 0.
FC omnibus F4 V6.0.
OK, thanks for the report. So I guess this is perhaps not new to 4.1.3 but instead something that has been reported before in earlier 4.1.x releases? Are there any existing reports that you know of or maybe you’ve just started using 4.1.x and just noticed this?
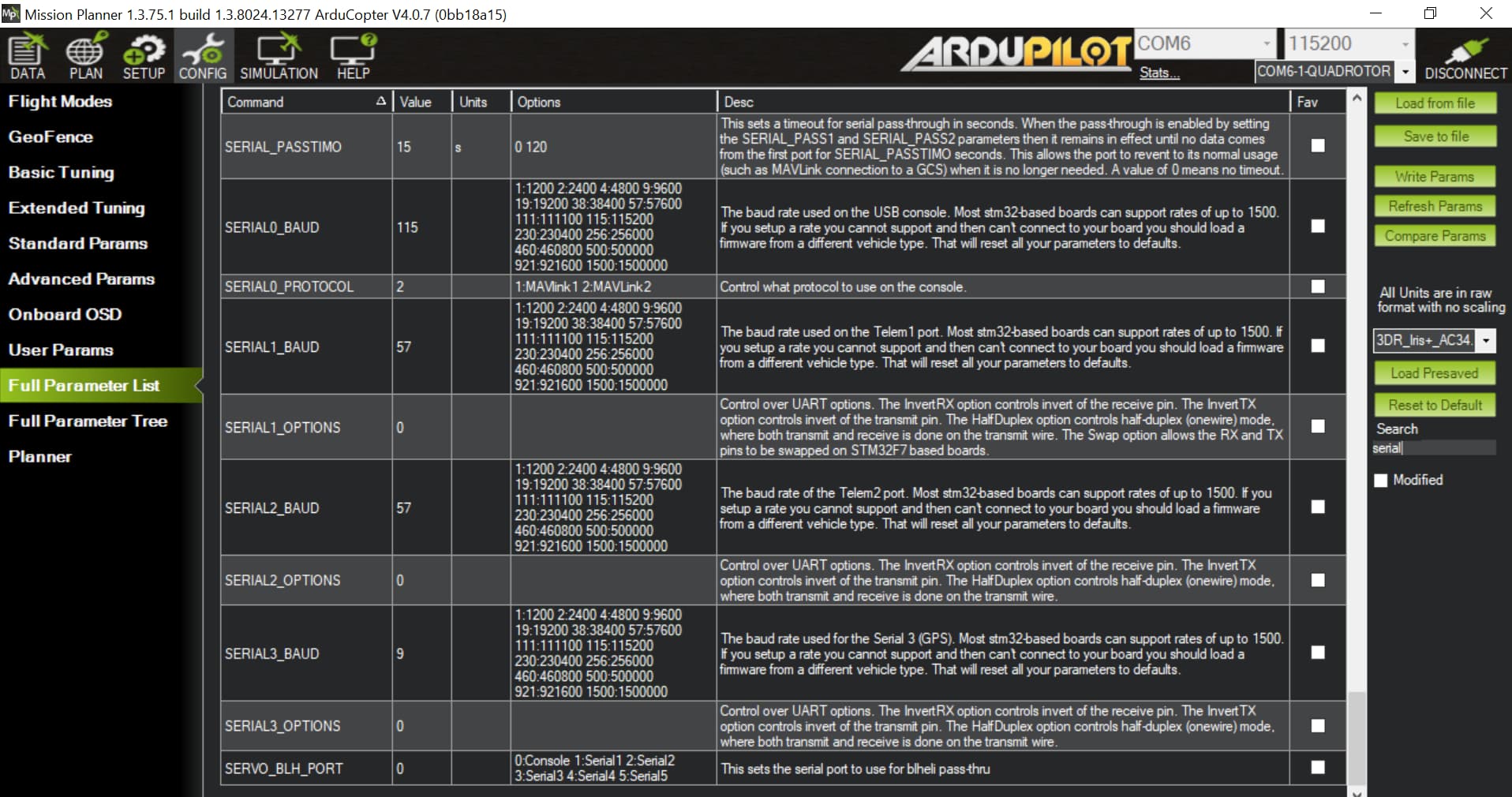
I just tried 4.0.7 stable and yaapu works perfectly, without changing anything other than the FW. Since 4.1 something has happened with the serial management, at least in the FC omnibus nano V6.0 F4 which needs an external inverter.
I don’t think the problem is with the script, but with the serials.
Thanks @amilcarlucas
no way
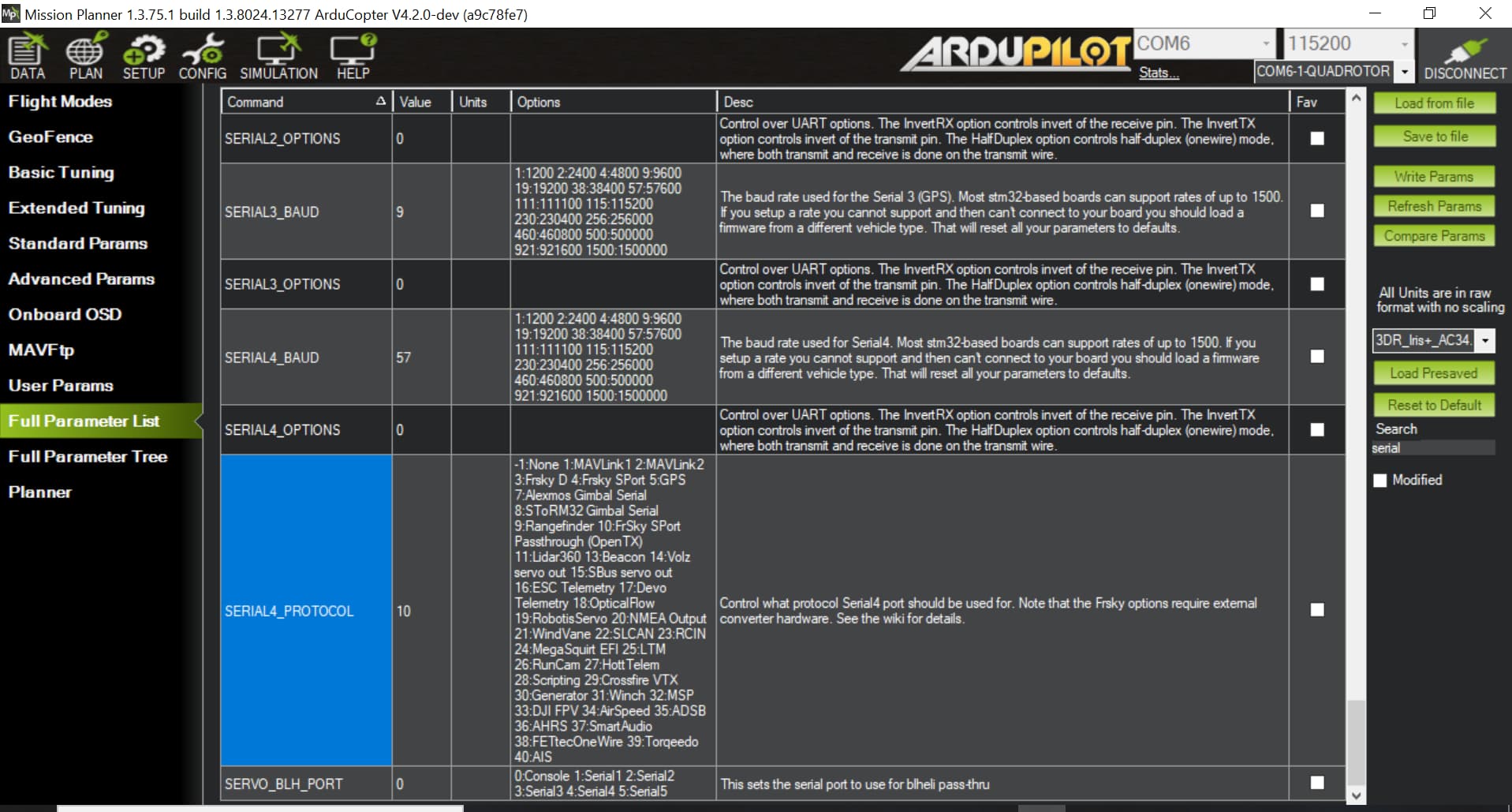
unfortunately nothing seems to change. Exactly like 4.1.3 I find serial 4 copy of serial 1 and “no telemetry data” on the radiomaster.
I’ve added this to the 4.1 issues list but I don’t think it will be resolved before 4.1.3 goes out. Hopefully @yaapu can help us get to the bottom of it though.
Thanks @rmackay9
in this case the script is important because it is a quad sub 250gr and there are no other telemetry. it is also interesting to check ekf3 on such small copters.
Hello, on ac4.1.1 why guided mode no respect geofences? It just mark geofence breached on the gcs, but don’t stop.
If i go in loiter on auto modes on the same flight it respect it……
Can you clarify the situation in which you saw this problem? Perhaps provide an onboard log if possible.
I just checked in SITL with 4.1.3-rc2 (which should be the same as 4.1.1). I created two polygon fences, one larger inclusion fence and then another smaller exclusion fence.
Then I tried “Fly-to-here” outside the larger inclusion fence and the command was rejected. Then I flew the vehicle through the exclusion fence and it correctly RTL’d home.
By the way, Guided and Auto modes don’t stop at the fence like Loiter mode. This was a conscious choice because we didn’t want vehicle to get stuck behind fences in Auto mode. This behaviour is not new to 4.1 though.
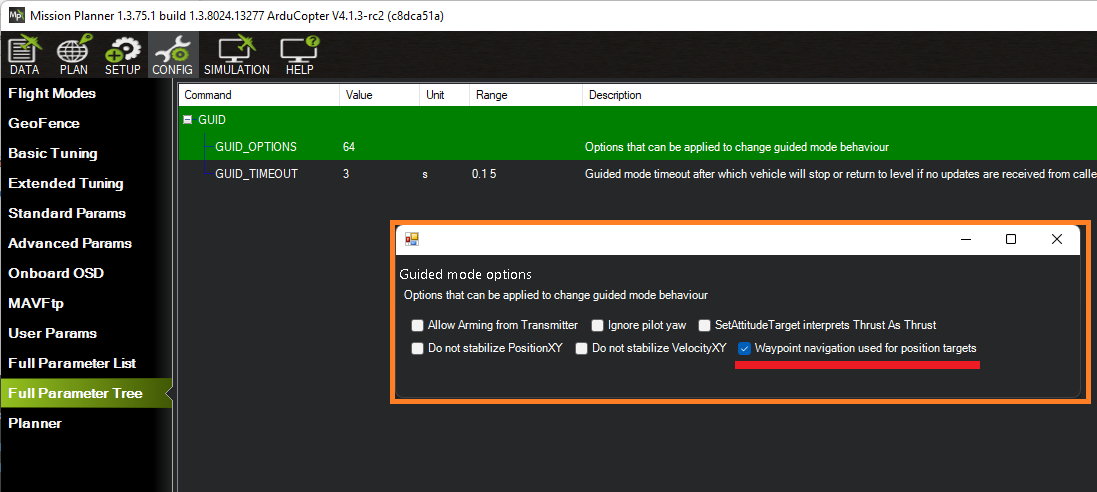
To cause the vehicle to avoid the fence then Dijkstra’s can be used. Even in Guided this should work although you will need to set GUID_OPTIONS = 64.