Txs for the feedback re MP crashing while loading parameters. I’ve seen this a few times now as well and I think @meee1 is looking into it. It’s also on the 4.1 issues list so it won’t be forgotten.
@meee1 (aka Michael Oborne) tells me that he thinks he’s fixed all the MP param load issues in the latest beta. I’ve lightly tested and it seems OK to me now.
By the way, the latest beta MP can be downloaded by opening MP’s Help screen, then select “Check for BETA Updates” and after a few minutes it should be updated (you may need to press a confirmation near the end of the process).
1 Like
@rmackay9,
I’ve tested three different versions today, It’s still crashing. 
Can you tell me which version you used?
I’m on the last one on your list and I also had it evaporate once last night but not again today. @meee1 requested some windows event logs from me so I’ve sent that and hopefully this will help get to the bottom of it.
Sorry for suggesting it’s all fixed when it appears it’s not completely fixed.
Alright, I can reproduce it everytime, Just let me know If you need any help.
1 Like
@XinChengGe, txs, I’ve passed this onto @meee1 and the “MP evaporation” is back on the 4.1 issues list so it won’t be forgotten.
Is there a plan to keep supporting the 1m version of the pixhawk? I see in the docs optical flow is removed in due to limitations, but does LIDAR work? Was hoping to use a TFmini plus on a pixhawk1 w 1mb limit
I just checked and I think that 4.1 does include optical flow support for the Pixhawk-1M boards. I see a “FLOW_TYPE” parameter on my ancient IRIS and so I think the feature is there. I’ve raised an issue to fix the wiki.
Yes, we try to support boards as long as possible so there are not plans to drop support for the 1MB boards including the Pixhawk with the 1MB flash limit issue. I’m sure downward facing lidar will be supported in 4.1 for the 1MB boards for as long as possible.
By thew way, when we run out of space on a board, normally we try to get it working again by removing new features rather than older existing features but sometimes this is not possible if the existing features have been significantly enhanced. Coincidentally we had a debate on this topic yesterday at the weekly dev team meeting.
Thanks Randy! Glad to hear there are plans to keep supporting it.
1 Like
Being the cost of new boards so low lately, i wonder if it is wise to use precious time in guarantee a retro compatibility on 5-6-7 years old boards.
Yes, that is exactly the question the dev team struggles with and we have different opinions on where the line should be drawn. At the same time though, AP is pretty efficient so the primary limitation is the firmware size so hopefully the GSoC project to support a custom build server is going to largely solve the problem for us… for a year or two anyway :-).
2 Likes
Re Mission Planner evaporating, this is happening to me again although only in very specific situations. I must be running Copter-4.1.x on a Pixhawk1 connected to my main PC. If any of these things are changed it works OK. So for example I can connect fine from my laptop, or I can use 4.0.7 or I can use a CubeOrange and it’s fine.
I’m working with @meee1 to try and narrow down the issue but no luck so far.
Hope a GSoC project Is not wasted only for backward compatibility while there is a ton of new stuff to explore and implement.
HI,I have the latest beta mission planner and still cannot get the params to download,done every thing asked on this thread,hopefully there will be a fix soon
and thank you every one for your inputs
1 Like
Im using the Cube Orange and a windows 10 and the latest firmware in the EFD mod and air unit,just to let you no the cube orange connects very fast by usb cable and thank you for your time
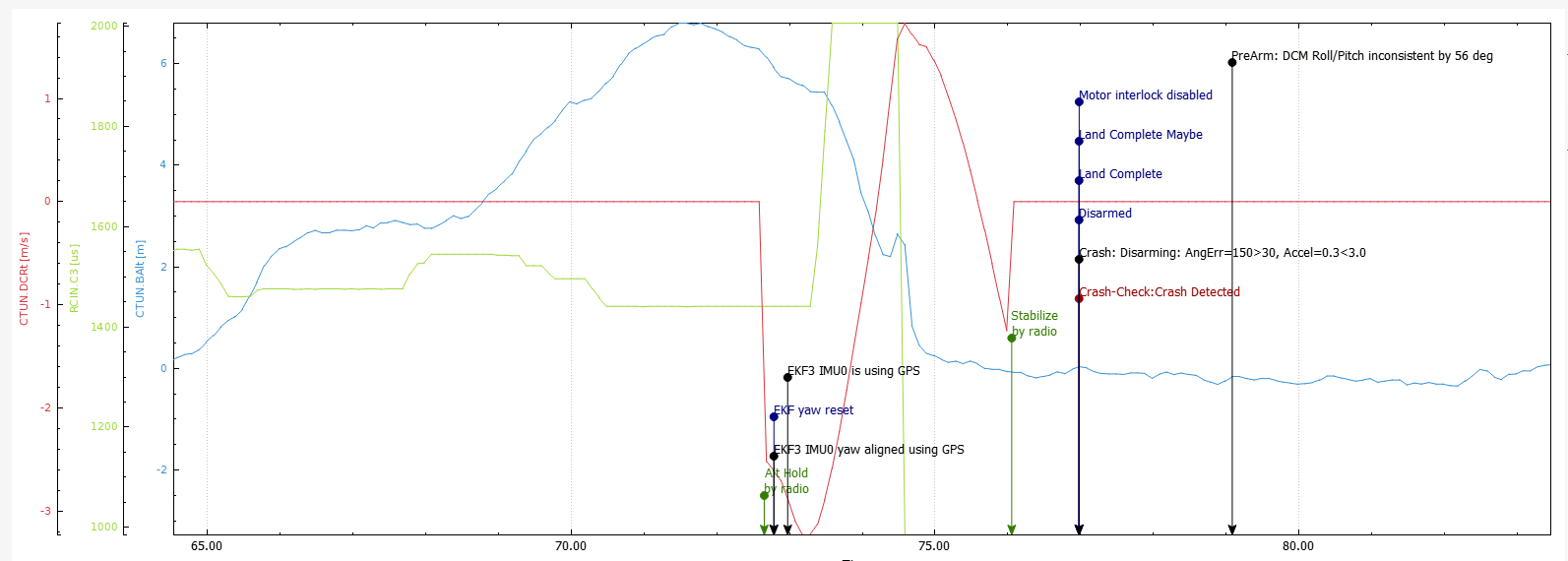
Had a fall from the sky when switched from STAB to AltHold.
For the first look the reason was the Desired Climb Rate got sharp negative value right after switch to AltHold.
But what caused DCrt to be negative?
Unfortunately this is BeastF7 board with small internal mem chip so have to disable some standard log parames.
I’m using GSF (GPS with no compass).
Here is the log 13 1-1-1970 2-00-01 AM.bin (924.1 KB)
And the onboard video https://www.youtube.com/watch?v=83pDvm_Qnkk
@rmackay9 could you please take a look?
Pretty sure part of the problem is your throttle is at 20% when you switch - for AltHold the throttle needs to be at 50% to hover and so the copter will try and descend. You get the opposite effect if you switch from AltHold to stab.
My throttle (RCIN C3) was exactly 50% at moment of switch to AltHold, it is on my screenshot.
What you noticed (on OSD) is throttle hover