Thank you for Your analysis of the logs!
I didn’t make any changes to the module settings via UCenter. I will follow your recommendations, and as soon as the weather gets better, I will try to fly.
1 Like
Hi!
I made a couple of flights today, changed the GPS speed settings, and tried to disable one GPS. There was no wind outside. Random movements on Pitch remained.
https://1drv.ms/u/s!AgyvhCRrlh2RlAJ9WIUg2cpciPMb?e=2vAB1J
https://1drv.ms/u/s!AgyvhCRrlh2RlANBaDjCZpOAFplb?e=yOpeeP
https://1drv.ms/u/s!AgyvhCRrlh2RlASbtsVuM8eAheAg?e=1uRzhi
Perhaps if there are no more complaints about this behavior, I really have problems with the configuration?
Thanks very much for testing. We discussed this on the EU dev call and we decided that I should produce a binary for you to test with that backs out the DShot change which is the most likely cause.
Here’s a link to the modified firmware. Once loaded you should see the firmware name appear as “ArduCopter V4.0.5-rc2-test1”. Could you give this a test fly?
By the way, we investigated the logs fairly closely on the call and we actually concluded that the GPS was probably not the issue but we also could not come up with a theory for what the issue was. If this binary doesn’t fix it then we will likely need to produce a series of binaries to help narrow down when the issue was introduced.
Txs again for your report and help getting to the bottom of this.
I’m ready to test the firmware. With this firmware, I will have to disable DShot in the settings?
Unfortunately, we have very bad weather right now, so I will check if possible.
I’m not actually sure. There were some reports that DShot was glitchy without this patch. This will look different in the logs from what you’ve reported though.
If you do decide to disable DShot then it would actually be interesting to hear if regular Copter-4.0.5-rc2 with DShot disabled still has the pitch glitches you’ve seen.
Without this patch, DShot did not work for me, there were constant failures in the operation of the engines.
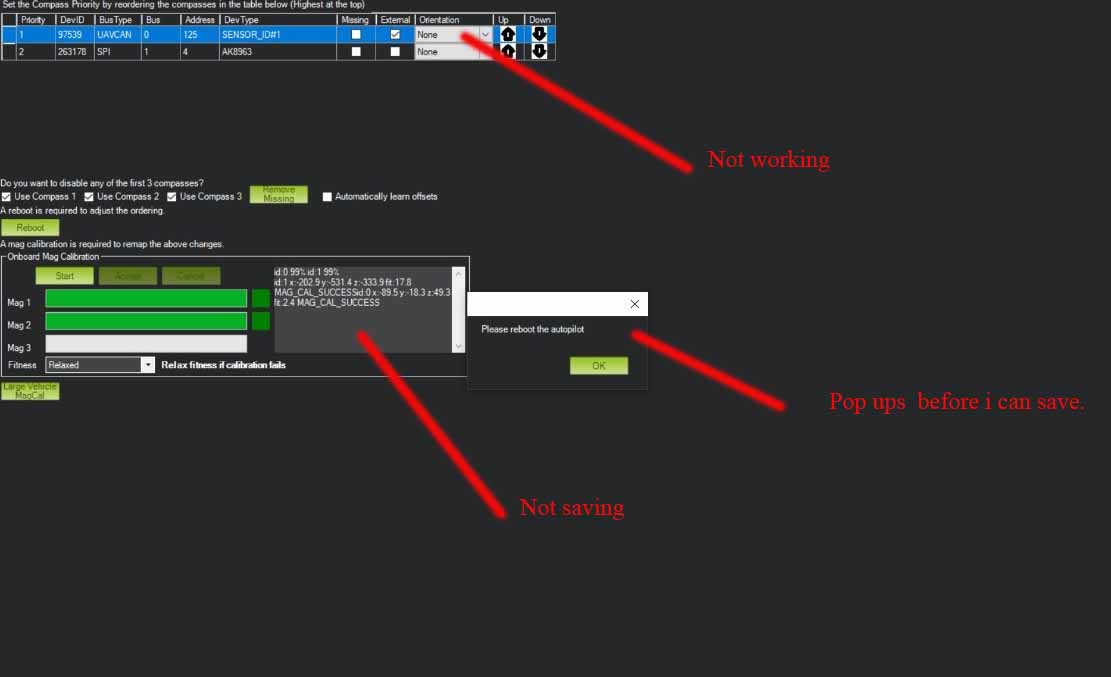
ArduCopter V4.0.5-rc2 mRo x2.1 During a GPS mag calibration the Reboot flight controller option pops up and does not allow you to hit the accept button. Also I am unable to select the yaw rotation. Learn Automatic offsets does not change the config Params. offsets number do not show after reloading. I thinking this is a MP issue?
.
Er, ok - how can 4.0.5 be worse than 4.0.4 then if 4.0.4 did not work for you?
First of all I apologize for blaming glitches on version 4.0.5
I’ve been testing 4.0.4 and all versions of 4.0.5 for the last two days. this glitch also appears on version 4.0.4. It becomes clearly visible when there is no wind, so initially there was confusion with testing versions. When there is a wind, this glitch is not present, the quadcopter hangs and fights the wind, it talks a little but everything seems to be within reason. Today I caught a moment when there was no wind on firmware 4.0.4, the glitch became obvious. This behavior occurs only on the PITCH axis and only in LOITER mode. In Stabilize and AltHold, the quadcopter hangs flat.
I hope the translator translated everything clearly…
1 Like
Thanks very much for testing and providing the logs. This is actually good news though in terms of the Copter-4.0.5 release because we now know that it should be no worse than 4.0.4 and we can tackle this loiter glitching as a separate issue.
I think the problem is the GPS update rate. It is still not successfully updating at 5hz for either GPS. Can you try setting GPS_GNSS_MODE and GPS_GNSS_MODE2 to 1 (GPS only)?
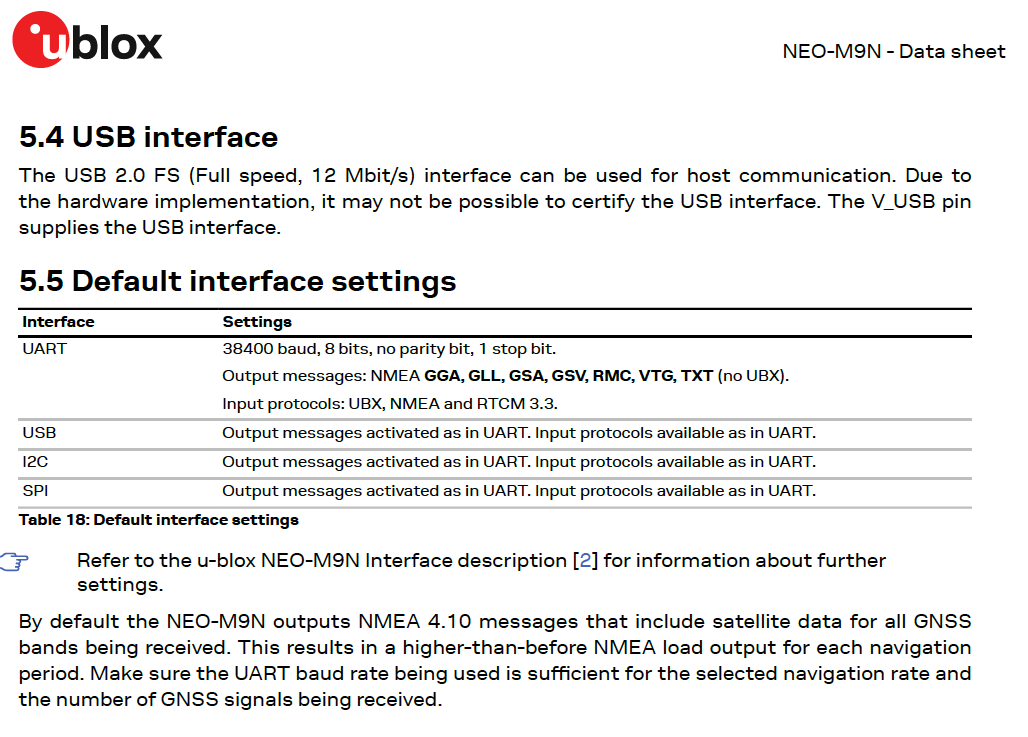
About the GPS rate, I’m trying a M9N. It is capable of 25hz refresh rates with GPS, Glonass , Galileo and SBAS enabled.
By default, UART port rate is set at 38400. Even using GPS USB port, NMEA load is too high and I have to increase the UART rate to 460800 to avoid drops in uCenter display as soon as number of available satellites increase.
It may be interesting to set both M8N UART (UBlox settings) and arducopter GPS serial port at 115200.
I will set my Navio2 GPS and report my feedback (arducopter 4.0.4). No drops with CUAV Neo V2 orV2 Pro GPS, they are set at 115200.
Txs, I’ve heard that some of the newer UBlox units (the F9 in particular) can run at 10hz (I’ve never heard of 25hz). In the past with other GPSs I have heard that the higher rates don’t actually add any value but we shall see I guess.
I’ve also heard that enabling Glosnass does not improve accuracy but again, I don’t have any personal experience with systems besides GPS and Japan’s Michibiki.
By the way, I think that AP will automatically detect the rate so hopefully if the GPS’s serial baud rate is increased, AP will automatically detect and use the new rate. Of course it doesn’t hurt to also set the approriate SERIALx_BAUD parameter in AP.
And it might be a lot better to use binary ubx instead of NMEA. On our tests everyting above 10Hz caused glitches in the PID loops (processor overload, maybe?). So I would recomend yout o keep it at 10Hz
Thanks for the tip. On the bench, it look good. I will have to wait a few days (bad weather) before flying.
Today I tested GPS_GNSS_MODE = 1 and 0, the behavior of the copter has not changed.
https://1drv.ms/u/s!AgyvhCRrlh2RlBjXXMr_kTdHwjvH?e=T5rIO6
https://1drv.ms/u/s!AgyvhCRrlh2RlBfPHQ4z8of8zmeT?e=Owcfhn
Pay attention to the GNSS0 file, where I took off in Loiter mode and the quadcopter hung normally for a while. After I gave the Pitch command, these random tilts started.
Do you have any ideas what else I can try?
The quadcopter is assembled on such a frame:

In the settings of the frame type, I have selected the frame “X”, maybe it would be more correct to choose “V”?
Can there be problems with arbitrary Pitch movements because of this?
X is right. As least that’s what I have used for the “dead cat” frames I have built.
Does this affect Poshold. I ask because I had a hexa do a funny pitch forward in Poshold. It happened again just before a crash so just curious.