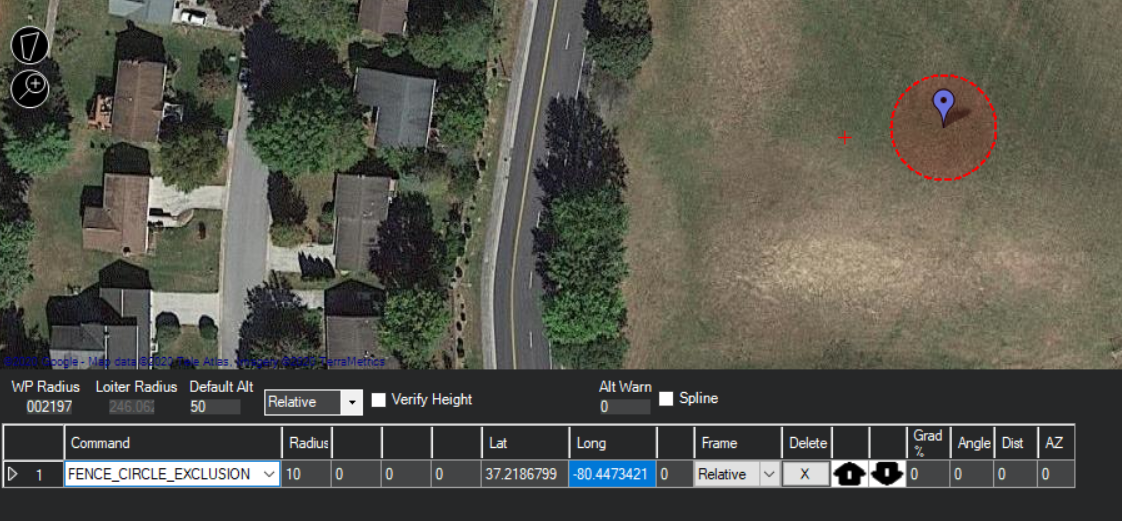
regarding the fence upload fail, can you please post what you are trying to upload? ie screenshot of the fence points
Not connected to the aircraft rn, but here is the fence that I had set. Just a simple circle to test the avoidance algorithm.
Ok I understand but still Graupner HOTT telemetry doesn’t work and it’s noticed in the beginning of this thread that it should:
6.Graupner Hott telemetry support
I managed to kill it a week or so ago.
tridge has just tested https://github.com/ArduPilot/ardupilot/pull/14502
and HOTT telemetry does work after that PR is applied to master.
Peter
2 Likes
The list of supported controllers say that the CUAV X7 is supported within this release, I have an X7 Pro on order, is that also covered or do I need to wait for another release?
Yes, I think the BRD_IMU_TARGTEMP param value of 45 deg is the current default. Hopefully that’s a good value…
Hi @manavgandhi17,
Any and all testing is greatly appreciated. If you could try out some of the items listed above that would be great. For example an auto mission using terrain altitude (without a rangefinder) or perhaps a mission with a Loiter-turns command in it and check that the nose of the vehicle points towards the center.
Thanks!
Yes, we still need to do some wiki updates including adding pages for the new smart batteries. These two batteries are from HiTech (the servo company) and my understanding is that they’re not available for purchase yet. I actually heard on the latest Partners call that the SUI may never be made available but the Neo will be. HiTech has already offered to help put up the wiki page so hopefully soon.
Sorry for the slow reply and thanks for helping with the beta testing!
@Corrado_Steri, @manavgandhi17,
Just to clarify slightly, the compass calibrator can correct the compass’s orientation (i.e. COMPASS_ORIENT parameter) by comparing the attitude from the accelerometers vs the attitude from the compass vector. It takes many readings and then tries to figure out which orientation of the compass fits best with the accelerometers.
The compass’s auto rotation code can be enabled/disabled with the COMPASS_AUTO_ROT parameter.
No, I’m afraid the solo gimbal improvements are only for the Solo gimbal. The PR is here but it seems like the enhancements mostly allow the solo gimbal to be used on non-Solo vehicles and expose controls so the GoPro camera can be controlled in the normal way (using auxiliary switches or auto mission.
You mean add numbers in the first (i.e. leftmost) column of the compass priority table?
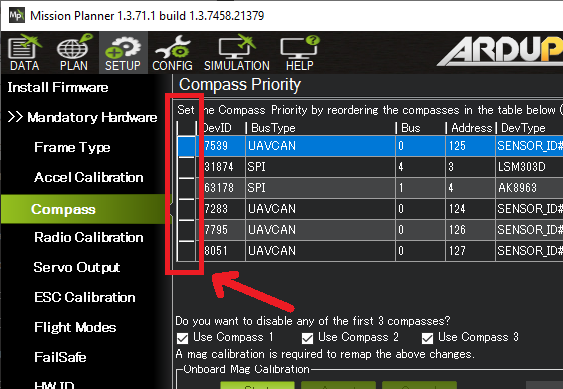
I’ve added this request to this mission planner issue related to this screen and I think MichaelO will make the change.
1 Like
Re parameter resets, there is also this additional fix included in Copter-4.0.4-rc1 that we hope will reduce the chance of parameter resets. By the way, the biggest issue we have with the param reset issue is just that they are so rare and so hard to reproduce the problem. If you (or anyone else) comes up with a reliable way to reproduce the param resets we’d would like to work with you to try and fix the cause.
Thanks for the report. It’s very annoying that this bug in the Hott Telemetry crept in but in any case we’ve got a fix and we now know there will be an -rc2 released in the next week. Txs again.
1 Like
Hi @gnitzan,
I’m afraid that the NTF_LED_LEN parameter change was not included in this release as far as I can tell. Sorry about that… I’m a little reluctant to include it in Copter-4.0.x and would instead prefer we left it to Copter-4.1 because it is more of a nice-to-have rather than a critical fix. Of course we have included a lot of changes already that one could argue that we should include this too… as a practical matter it simply wasn’t marked by any dev as “Backport to Copter-4.0” so we didn’t discuss backporting it.
Anyway, I guess I’d prefer that we left this enhancement it to Copter-4.1.
1 Like
Nothing but issues with the new beta even reverting back to stable made issues. Compass offsets missing and failure to accept new data even green bars fails and crashes. Automatically learn offset are gone in the new build of MP .In flight very slow to connect to GPS and flyaway conditions. choppy flights
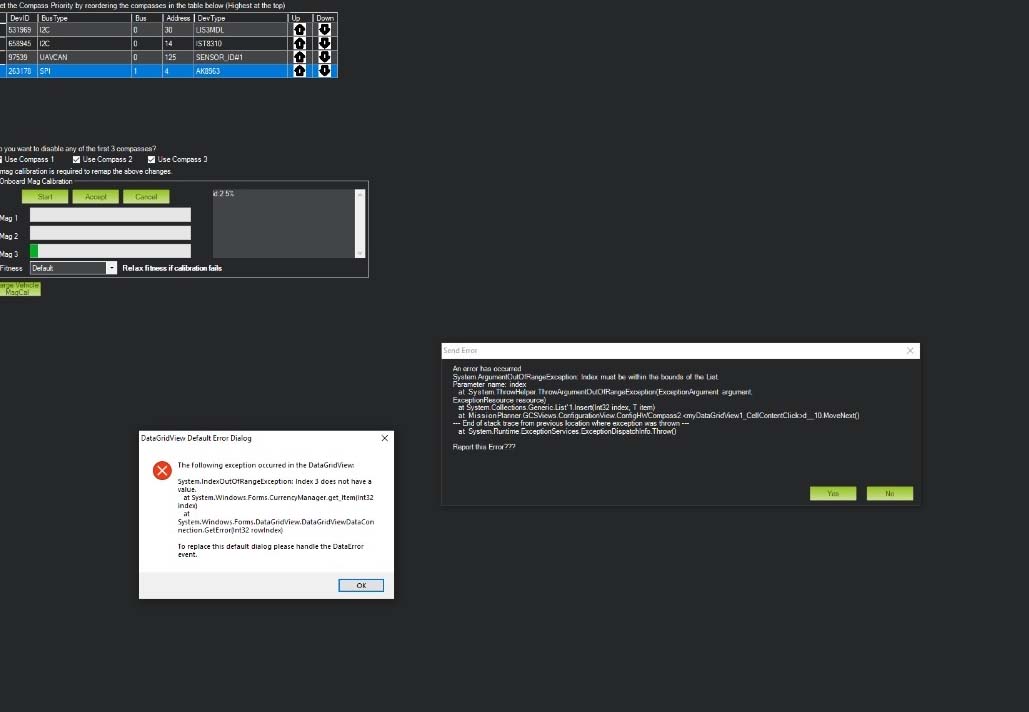
sorry about that, it is fixed by this PR:
we’ll include that in next beta
2 Likes
On a good note I getting some nice results with Stable 4.0.3 https://www.dropbox.com/s/6hmgkcnexiuydo1/M16.mp4?dl=0
Thank you @rmackay9 for the information. I know this fix would probably be of minor use to most, I still loved the idea of 32 neo pixels showing me the status on my FC without the use of scripts. I am in no rush. 
1 Like
@manavgandhi17, @Corrado_Steri,
Thanks for the discussion regarding the compass orientation and external settings. These are missing from the new setup page but we’re are going to see if we can add them back in at least as read-only parameters in the table. It is a little tricky because these compass specific parameters (offsets, scaling, external, orientation) are not moved immediately as the user moves the compasses around in the table, instead they are only moved on the next reboot. As a minimum I think MichaelO will add a “reboot autopilot” button just below the prioritisation table to encourage people to reboot after updating the order.
FYI, this is a potential situation where people could end up with the wrong compass orientation:
- change the order of the compasses on the prioritisation screen
- go into the full parameter list and change the compass-orient parameter for one of the compasses
- reboot the autopilot
- on startup the compass prioritisation code will move the orientation (see step2) to another compass
Now most users probably don’t modify the orientation and we have pre-arm checks that might catch the issue but we need to be careful and think about this screen some more.
Txs again for the discussion.
Yes, the CUAV-X7Pro is supported by Copter-4.0.4-rc1. The regular CUAV-X7 firmware has been enhanced to check for the new high end Analog Devices IMU. When it arrives you’ll be one of the first users to fly this autopilot I think. I’m not the expert but I think we don’t really know yet how much the high end Analog Devices IMU will help and whether or not we need to re-tune the EKF slightly to take advantage of it.