After following the the Storm 32 Gimbal document on ardupilot and OlliW.eu . Found here, and Here
I have been unable to use Mavlink to control the gimbal. In the Mavlink document found on Olliw.eu it mentions setting the Mavlink port in the GUI software, however I am unable to find this option under the advanced tool menu. What am I doing wrong here?
First off we need to use terminology that is specific to STorm32 and ArduCopter. GUI is non-specific We are dealing with two separate applications, namely OlliW’s 32BGCTool and Mission Planner.
I am using Telem1 for serial/MavLink Targeting and I have a slider and a knob setup on my radio for manual control (RC Targeting) of Pitch and Azimuth respectively.
So if I understand you correctly. You are using both the MavLink connection and the servo connection for your setup. Are you able to use Mavlink and RC control at the same time. I ask because it seems, in order for the RC controls to work the camera gimbal needs to be switched to servo mode, making MavLink no longer the active method of control. Let me know how far off I am. Thanks.
I will be watching this thread like a hawk!
Alright, run me through this one more time. My gimbal tilt is not responding to Ch6 knob on my QX7. It was working fine before I switched to QGround Control. Currently here’s where we are:
QGroundControl v3.5.2
Pixhawk Ardupilot 3.6.9
Storm32 board v1.30 F103RC, v0.90
Storm32 UART is connected to Serial 4/5
“SERIAL4_BAUD”=115200
“SERIAL4_PROTOCOL”=8
“MNT_TYPE”=5
“MNT_RC_IN_TILT”=6
ALL communication between Pixhawk and STorm32 is done over the serial port connection. This includes MavLink and RC Targeting.
By default STorm32 initializes in RC Targeting mode. In this mode, commands from the RC transmitter go from the receiver to Pixhawk via SBUS, and then Pixhawk sends those commands to STorm32 via the serial connection.
To enable MavLink targeting in Mission Planner go to Flight Data > Actions. Click the last drop down . Click MavLink Targeting. RC Targeting is enabled in the same way. NOTE: you cannot use RC Targeting and MavLink targeting at the same time.
Also, try as I might I cannot find any gimbal control functionality in qGC. Not being an avid qGC user (I prefer Mission Planner) may have some so bearing on this…
I have followed the advice given by OldGazer with no luck. I followed the Ardupilot walk-through and change all of the settings as described. I am using telemetry 2 so I followed those steps.
I have the Ground, Rx and Tx wired into the Strom32 v1.3 board as shown in the Ardupilot walk-through picture.
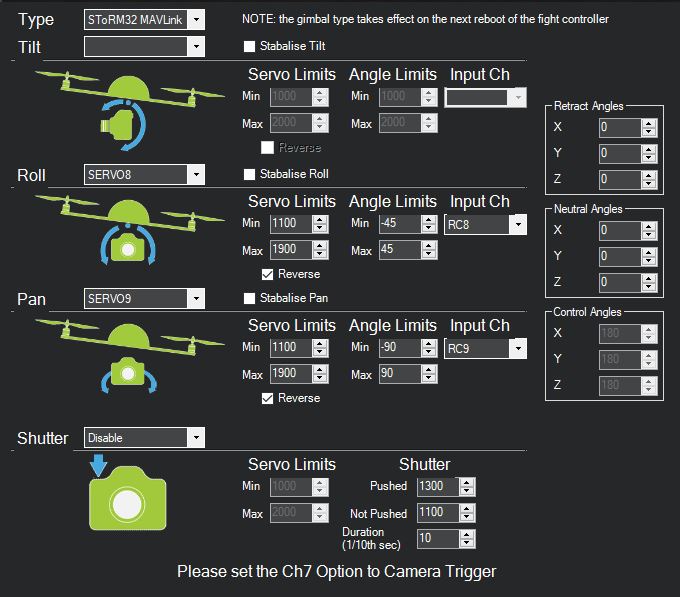
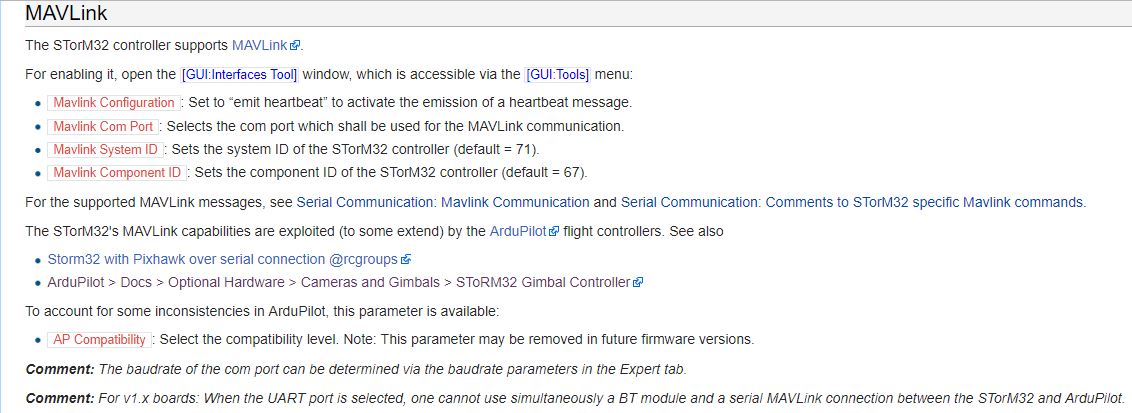
I have turned on the RC targeting under actions with zero change. The gimbal will not respond to radio controls. On the OlliW site under advanced functions is states the steps required to enable MavLink. I have followed all of these steps but one. I can’t find the Comm port it refers to enable MavLink. Attached are screenshots of the camera gimbal and action tab in Mission Planner along with the MavLink instructions of OlliW’s site.
I hope I have explained things so they make sense.
is there an explanation anywhere of how to setup storm gimbal for a target tracing using gps coordinates communicate from the ground station into the pixhawk?
i also understand there is a way to use camera control signals from arducopter - but, not sure - i tried it as well but always failed and simply do a propagation of the sbus channel into storm and use its own output pins to control shutter. yet, i understand, it could have been done properly as well, using arducopter generated functions?