Still busy testing 3.6.3 ( I see 3.6.4 is already out !!! )
The situation that I was testing it in was in a farm-setup where you inspect certain parts of the area. Then the flight pattern is very wide and varying. Not a “linear” (??) take off and fly in more-or-less a direction and then return. So in my case, the SRTL found its way back along the entire flight path, which was not ideal in this case. I am still playing with the parameters to see if there is an improvement.
Even though there are flights that would seemingly work better with “normal” RTL, I have to applaud the developers for the SRTL code. I have watched it and in some flights it works really well !! I also like the SRTL landing better than the RTL. It comes in at the same take-off path and lands quickly, where RTL tends to be a bit slower and more “cautious” . Which in itself can also be a good thing depending on the situation.
Sprayer is still there but I suspect the flight controller being used suffers from the 1MB limit which means the Mission Planner is loading the -v2 firmware. It should be possible to load the “-v3” firmware onto the board manually (assuming this board is part of the Pixhawk family of boards). If you’re happy to use chibiOS then the firmware can be found here (look for the file ending in .apj).
When I tested the SRTL function there were a number of things that really worked well.
e.g a more “effective” ( is that the right word ) landing. It comes in the way it left.
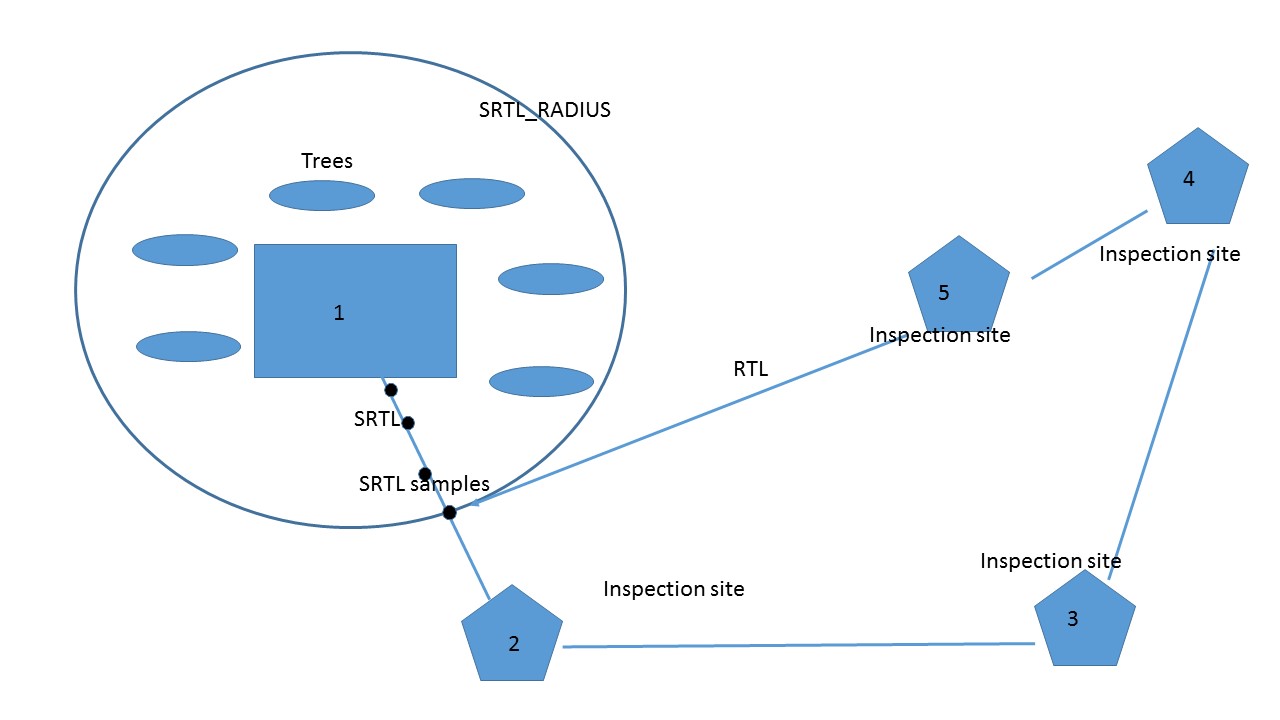
While I was testing it out on a farm, there was a location with trees in certain places
around the launch site. I have attached a diagram to try and illustrate. So when flying from 1 …2 …3…4…5 and then wanting to return … if it would do a SRTL it would
fly all the way along the incoming path. If it would RTL, it would fly into the trees, unless
you set the RTL_ALT higher ( off course … )
If however, it is possible to “mix” SRTL and RTL. It first does a RTL to the intersection
of the SRTL path and a definable radius called “SRTL_RADIUS” , and then initiate a
SRTL from there.