Would you help to understand what’s going on with this copter? The idea was to manually takeoff in AltHold and keep the copter close, with 2 or 3 meters altitude and hovering. It stays quite stable for a few seconds, then it starts to oscillate pitch and roll in a uncontrollable way. Maybe something faulty is confusing the EKF?
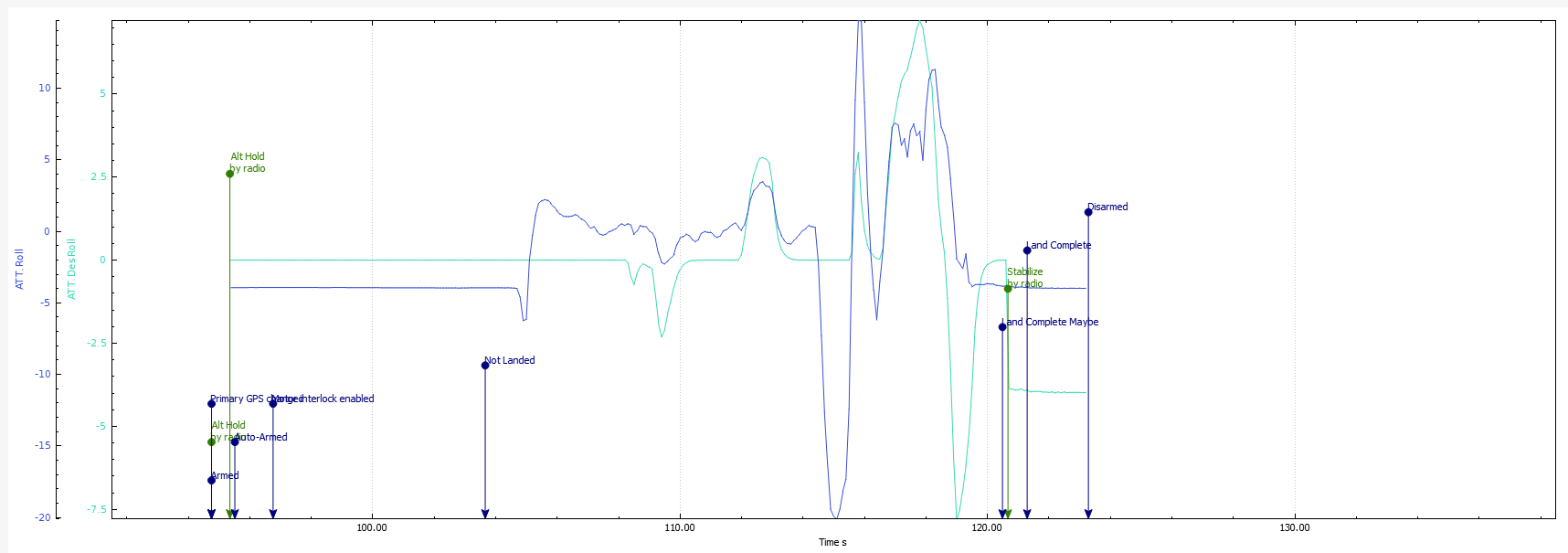
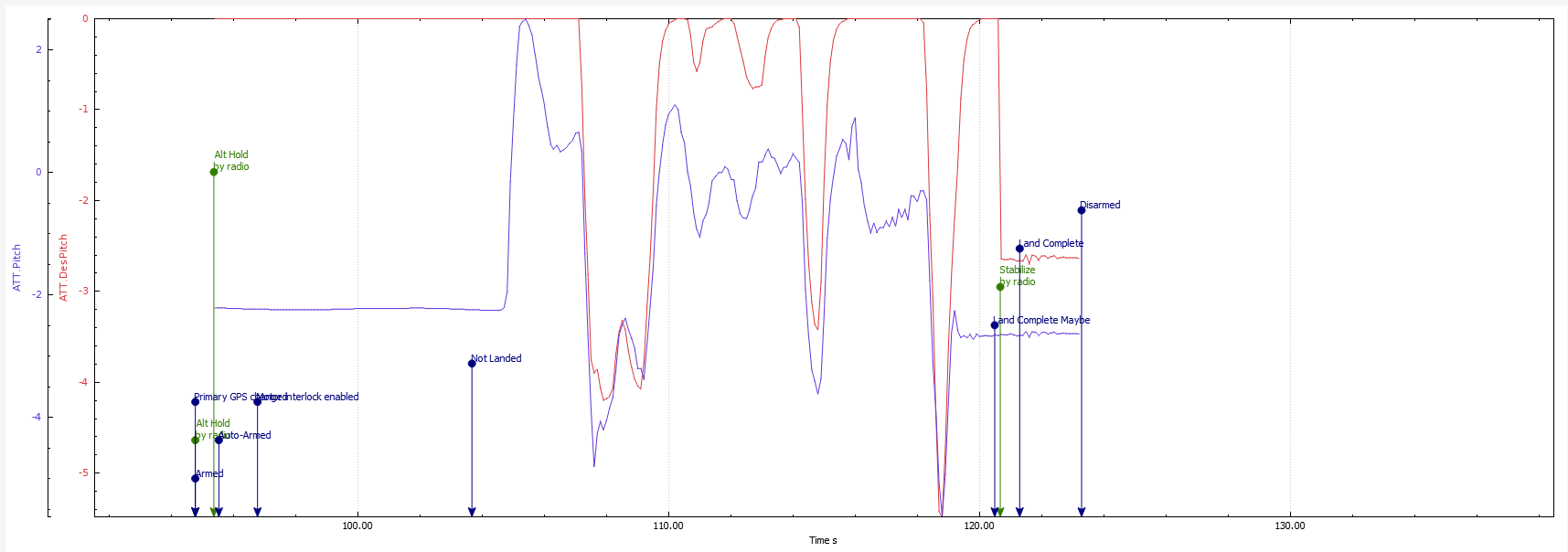
Yes, I saw there is a difference between the actual and desired values. But I would like to understand what is causing these oscillations… Because this vehicle was flying nicely earlier today, hovering for 17 minutes in a row. Then, in the second flight, it took of and kept stable for a few seconds (the log you have), suddenly the oscillations start and I have to land…
So, I’m trying to understand why it was working earlier today with no problem, and now these issues. Vibrations seems fine, and AltHold does not need GPS. So maybe a hardware problem?
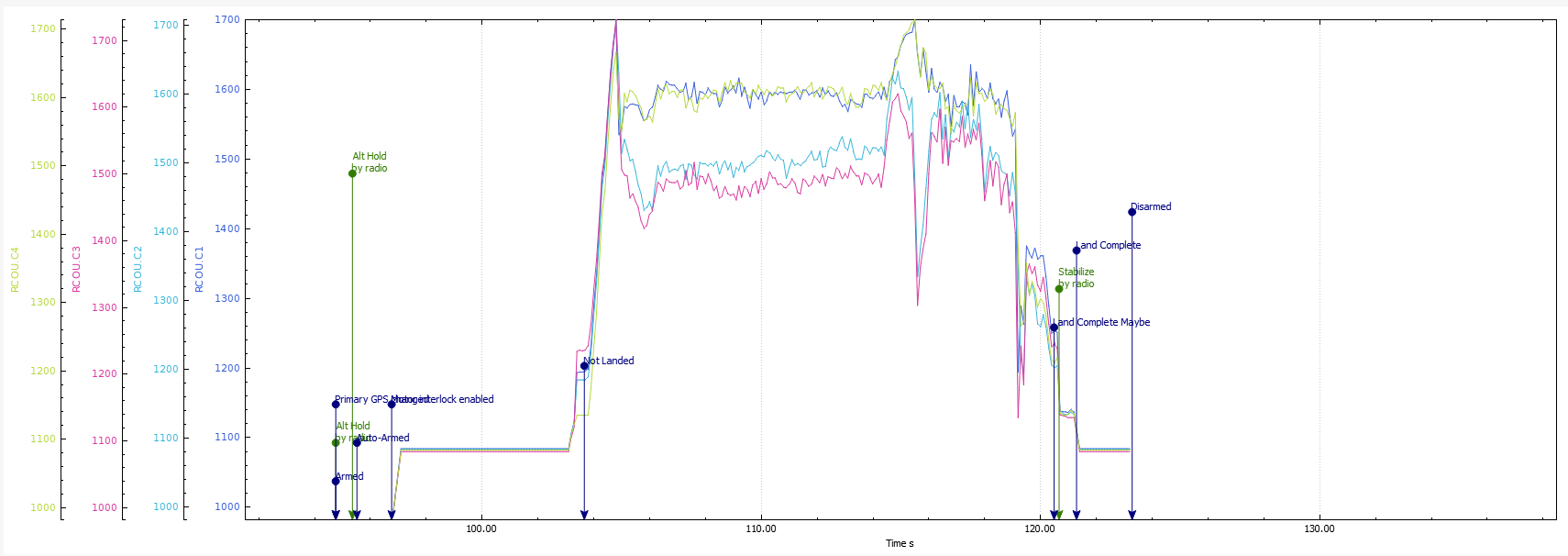
@dkemxr Hi, Yes! It was flying great. The mapping is because we are using the Kore carrier board from Spektreworks. That’s how they map the outputs to fly hexacopters. The same will happen for octas, their design is different from the Proficnc one.
But still, I am diving here in the logs trying to understand what’s going on. I tried 3 times after the first flight. And it’s behaving the same… It does takeoff, keeps level for some seconds, then nightmare…
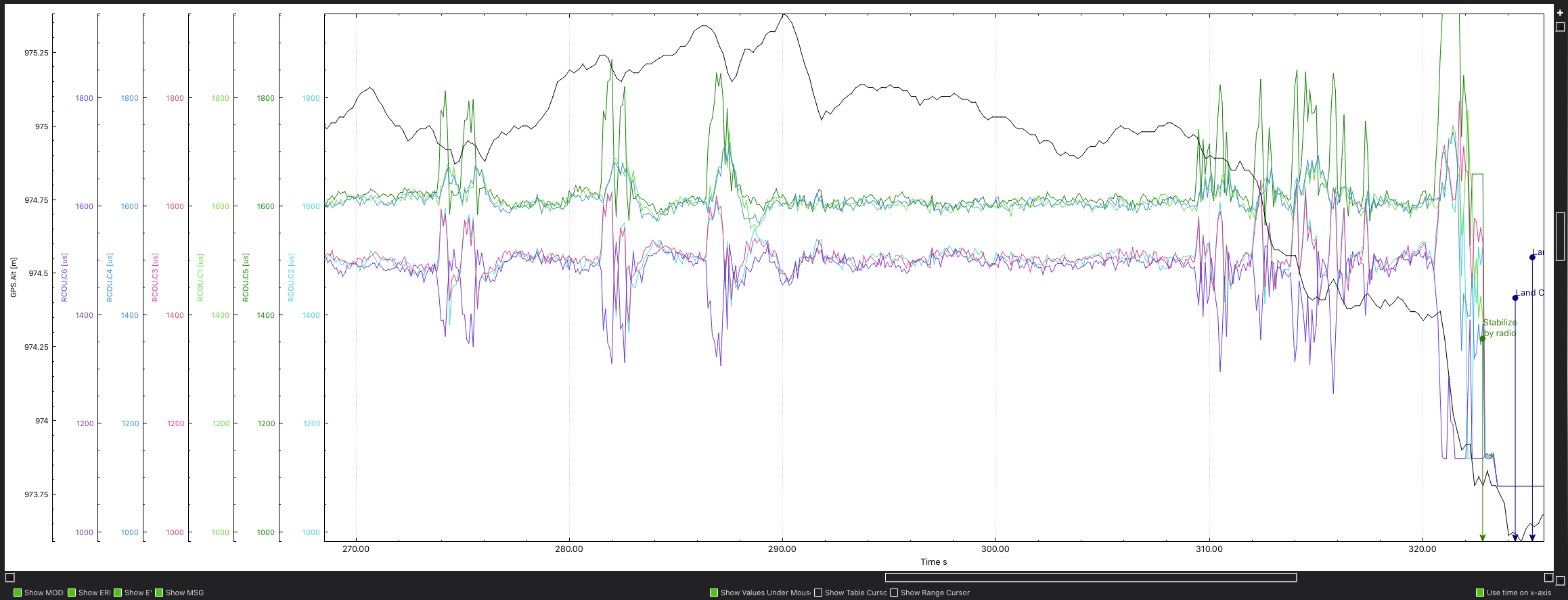
@hosein_gh Take a look at this new log. I’ve just tried a new flight. Also, this time I replaced the flight controller (CubeBlack) with a new one. And the problem persists… See that the copter remains stable for some time and suddenly it does experience weird oscillations, then comes back to normal by itself. In the end I had to land. I suspect for a hardware problem, but would love to know if you can see anything in the logs.
You haven’t stated prop/motor combinations but at 6S I am assuming props are greater than 13”.
Have a read of the Tuning Wiki here and make the recommended adjustments and try again as recommended by @hosein_gh
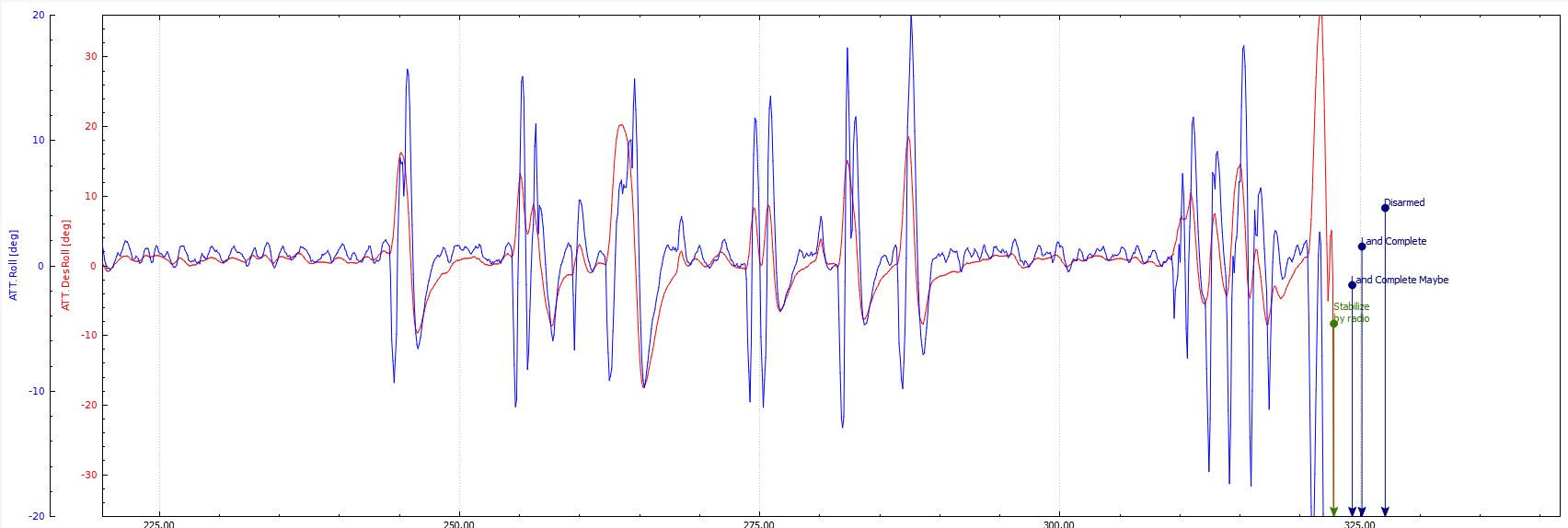
I agree with Hosein and Mike. Due to the large thrust imbalance, roll stability is very poor. Look at the overshoot here from Desired Roll/Roll. This could be exacerbated by a tuning problem as mentioned.
It turned out to be a hardware problem. The ESC on Motor 2 had a broken capacitor lead. When it was in contact with the circuit ESC board, the drone was performing quite well. But when the contact was loose, it was like the motor had no power and the drone would bank aggressively to the left causing the behavior you saw in the logs.