Would you help me to understand what happened with this auto mission flight? It was a hot weather, close to 40 Celsius. After some minutes flying fine, it looks like the copter started to loose his heading. I then switched to RTL and the vehicle had a hard moment adjusting the yaw before coming back. When it was close to home I switched to Loiter for manual control. The vehicle had a sudden descent stopping a few meters from the ground, even with max throttle. Finally, it managed to hover and I could land it safely.
Could you give some advice on what went wrong based on the logs?
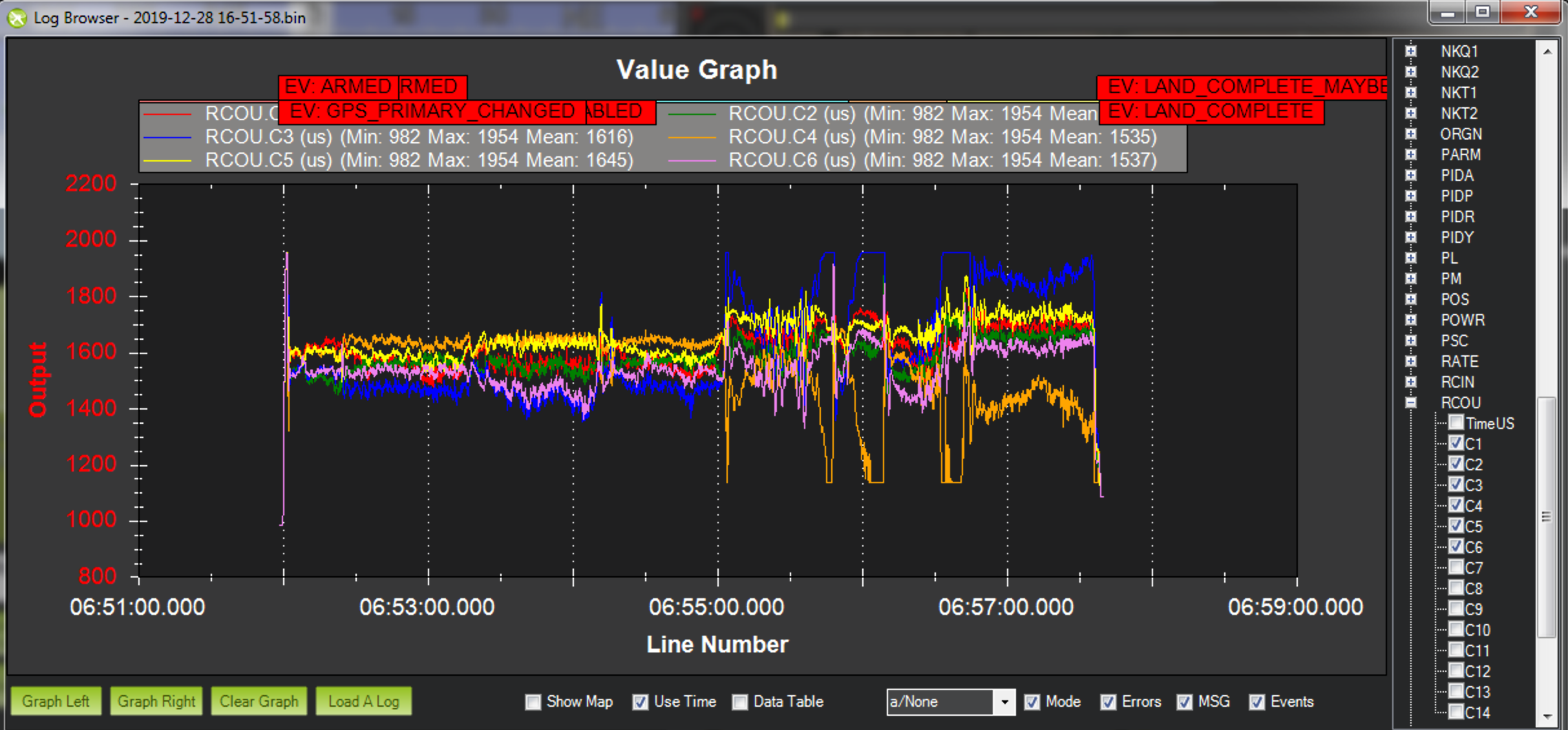
I’m not the best at reading logs so please wait for someone with more experience than I have to comment. As an exercise I plotted your RC Out and it looks like perhaps one of the motors was failing. Notice that C3 and C4 went to extremes several times.
I agree with Darrell. Motor 3 lost thrust (RC3 command driven high) and attempted compensation on Motor 4 opposite arm (RC4 command driven low). Check ESC, motor or prop on Motor 3.
@darrell@dkemxr That makes sense. I believe because of the hot weather, the ESC probably started to cut the motor due to high temperature. Thanks for your input!
It’s a shame we don’t have logging from ESCs yet, although it is possible with DShot ESCs now so it won’t be long. But I think thermal cutoff of an ESC is a strong possibility. Do what you can to get some more airflow across them.