If you have an SD card, it should be supported. Logging to the internal memory is not supported yet. (Like, if your card has a 16mb blackbox)
To disable the check, go to the “standard parameters” screen, and under arm checks, check everything other than “All” and “Logging Available”.
Thanks, did this. But now I have new error messages:
PreArm: Waiting for Nav Checks
PreArm: gyros still settling
No IO Thread Heartbeat (fsync)
EKF2 IMU0 in-flight yaw alignment complete
Frame: QUAD
omnibusf4pro 00320043 30374712 31313731
ChibiOS: 6686ee8a
ArduCopter V3.6.0-rc8 (c85496e7)
But able to arm the quad!
And moving the quad manually seems not having altitude change reports… like baro not detected.
That’s all OK. I don’t know what the No IO line is about, but the others are ok. Usually just means it’s waiting for all its sensors to agree w/ each other. (getting GPS data, etc).
Not sure why it’s not showing altitude changes… I really struggled w/ my baro, but tinkered w/ it last night… Just took a test flight, and it’s all working! I’m going to make a post about it.
ok, thanks, think will put it outside to get a GPS fix, could be the reason.
Ok get the first GPS fix (new BN-880) took the time… But no more error, Except the “BAD Looging” when I arm.
Hi all
I build small quad with pixracer with chibios 3.6-rc8. I calibrated esc , mag, acc , rc
Unfortunately, after the start,copter stopped responding for the throttle
It seems like throttle will be on maximum level and I cant decrease it . I hold down throtlle but quad still kept rasing and finally fell and crashed completely.
Thx in advance
https://drive.google.com/file/d/1kabzPU3yRckFIxfJsWOrTdfBM1jlVEhp/view?usp=sharing
Try to set manually the min and Max value in esc calibration menù.
1000 min
2000 Max
And recalibrate.
Finally got the Omnibus F4 V6 working.
Flies ok for default pids etc. Only thing that doesnt work is the Logging on the onboard memory so cant diagnose anything at this point. But gotta say thanks to everyone involved in the Chibios version, glad its working ok.
Is there any chance that the on-board memory will ever be able to be used ?
1 Like
One more update, I can confirm ALT Hold and Loiter work perfect. I added a bit of foam over the Baro and it holds spot on now 
3 Likes
Hey,
I have a Pixhack v3, running Arducopter 3.6.0-rc-8 as of 4 days ago. I have noticed a problem since 3.5.0 where the second internal compass does not get used. No reply from even the CUAV people on this issue. That is why i’m posting here. Noticed this issue for very long. Any changes need to be made by me in the copter or?
I’m posting all the pictures of the Parameter list as seen in Mission Planner. Running Mission planner 1.3.58.
Thank Y’all in advance. Hoping this can be fixed, as it has stumped me for too long now. 
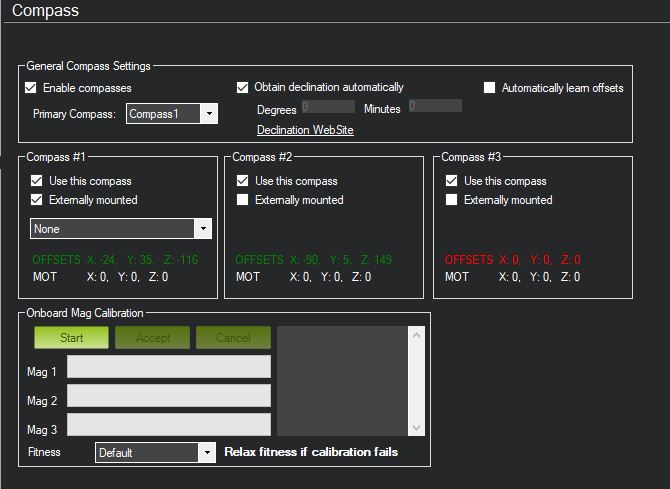
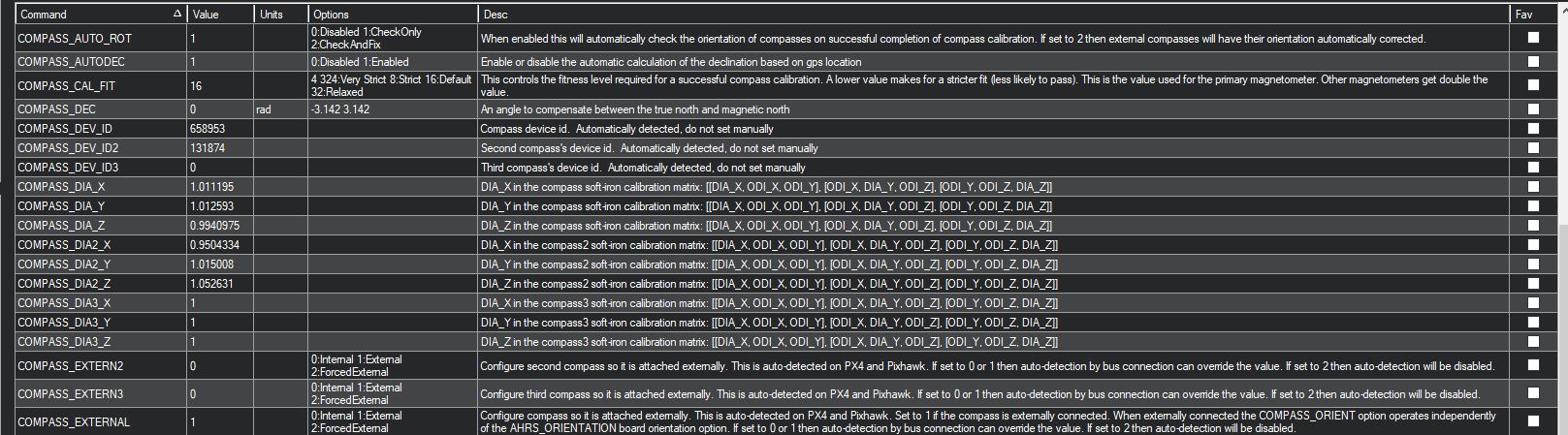
What is in the Full Parameter list at the bottom of COMPASS area? You are not showing that.
Compass_use, 1
Compass_use2, 1
Compass_use3, 0
It should look like that, if it is not there type it in and write it and reboot the FC
I trust the Parameter list more than the graphic pages.
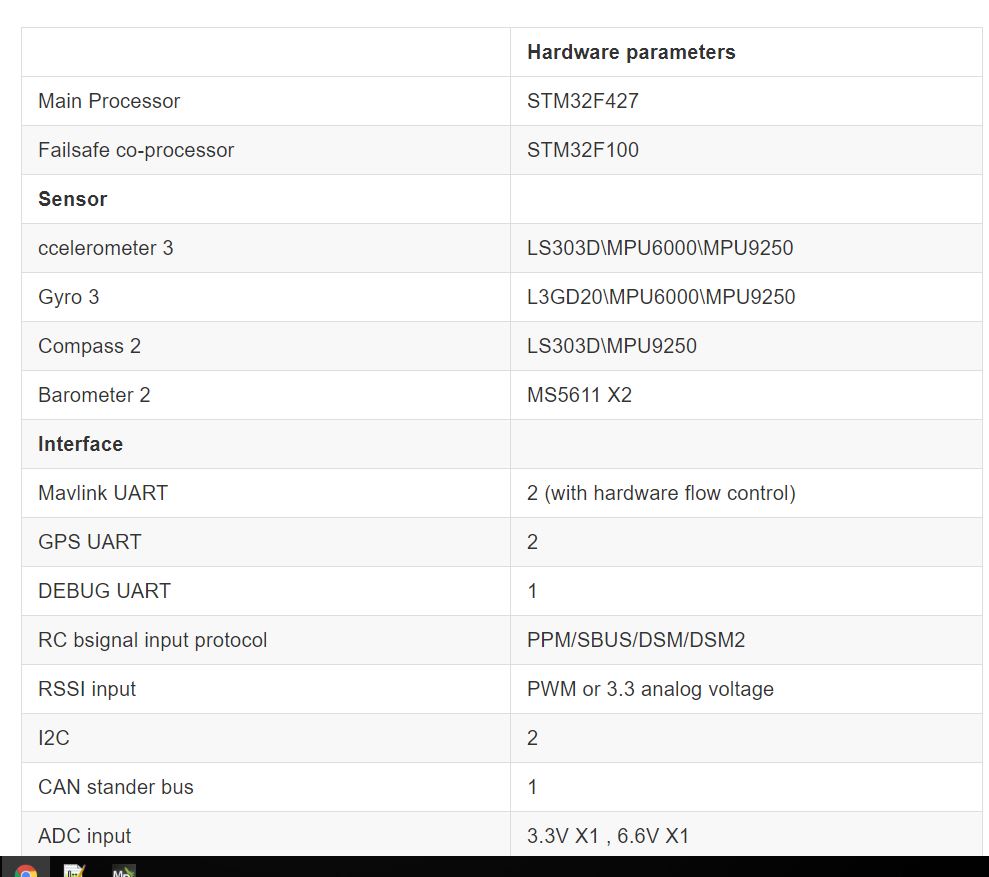
So Sorry for that. I have put that in this picture. As you can see, I have asked the Pixhack to use all 3 compasses, but it only uses 2, one external and 1 internal, but according to the datasheet of pixhack v3 datasheet, it has 2 internal compasses as seen in this link( Attaching picture of this too)
Pixhack v3 datasheet

I see you want 2 internal to work.
The external has the best value and usually always has if it is mounted correctly.
Your internal 1 values are not bad and you should be happy with that. A third value which could be even worse will do nothing for better position accuracy. I have flown for years with one external only with perfect results on 2 Helicopters.
Now I have one internal with good values involved.
BTW I am a normal user and not an expert. I gave you my experience and cannot help you further technically. Good luck.
The compass on the MPU9250 IMU is not being recognized or there would be a device id for it. But by experience with that compass on Pixracers it is of little value anyway with offsets always way too high for it to be useful.
to folks above having compass calibration issues… make sure what you have set, especially if you do a custom chibios build for a auto-orientation parameter. i suspect it may be a bug in there, as i noticed a couple of times doing calibration on my model that, first of all, in the situation with the auto-orientation it prints a message to the log saying what this orientation is, as it thinks. so, when it is not what it thinks it is - it prints a numerical code for it, but refuses to set it and in this case it reaches the end of the calibration bar and then goes from scratch again.
just check the log output - cancel out compass calibration and check in the messages window if it cursed about your anticipated orientation or not. on a bigger model i have where i have compass installed in the factual ‘none’ orientation it was forcing me set it in the orientation 14 - weird ‘roll180yaw270’ or it would not calibrate. then, after placing on other spot it completed calibration with the 0 - orientation ‘none’.
1 Like
I’m able fo flight with F4 Omnibus V5.1 (without telemetry)
BUT
I have to disable Geofence, message: Prearm: fence requires position, strange, I have 9 Sats…
Hello,
had some flights with ChibiOS rc8 at Cube and Pixhack V3.
- Dshot now running smooth with KISS 32a
- compass calibration onboard
- Autotune all axes finished after 6 minutes with quad 13" and 15"
- RTH, servo gimbal, relay pin all ok
at the moment I can’t tell any issue - compliment to all the devs
but maybe someone can explain why at Pixhack V3 the IMU’s don’t want fast sampling???
With Pixhawk 2.1 two IMU’s are fast sampling!
Also at Pixhack V3 the third Compass is not detected anymore compare to 3.5 but that’s not really an issue.
1 Like
@Varun_Nelakanti and @Cipta,
Thanks for the reports on the issue with the PixhackV3. I’ve added them to the to-be-investigated list.
1 Like
Thank you for that @rmackay9 .
I understand that 2 compasses are always going to be enough, but i just wanted that option for the 3 compass too, as I would like to test out the flight with all 3 compasses vs 2 compasses.
It is because the PixhawkV3 has older MPU6000 IMUs, whereas the Pixhawk 2.1 has MPU9250 IMUs, which are capable of fast sampling (up to 4kHz accels and 8kHz gyros). The MPU6000 can’t do more than 1kHz accel sampling with FIFO enabled.
can you post a DF log or tlog of a PixhawkV3 showing 3 compasses? I received a PixhawkV3 from CUAV last month and it has one internal compass (in the LSM303D), plus an external compass in the GPS. If you can send me a log then I can see what compasses are detected for you.
Cheers, Tridge
1 Like
Hello Tridge,
thanks for answering. Log Pixhack V3 with 3.5.5 - 3 compasses.
According to the specs on their website
Processor STM32F427
Failsafe co processor STM32F100
Accelerometer X 3
LS303D MPU6000 MPU9250
Gyro X3
L3GD20 MPU6000 MPU9250
Compass X2
LS303D MPU9250
Barometer X 2
Should be a MPU9250 there
At the moment with 3.6.0 RC10 I have enabled 3 IMU
With the Pixhack I have also observed the IO problem but with a faster sd-card it disappeared. Are there other card requirements with Chibi or 3.6 in general?
I have already mentioned that the missing third compass is not really an problem because its the “bad” one ![]()
Greeting from Swabia