Hi guys,
Could someone comment on what the expected level of UAVCAN functionality in RC12 is? I’ve got a Zubax GNSS 2 to test on the desk: thus far GPS seems to work (excepting for https://github.com/ArduPilot/ardupilot/issues/9579), but not compass and baro. Is there supposed to be support for these? Don’t want to waste people’s time trying to fix things that aren’t ready yet.
Thanks!
I have a GNSS v2 and RC12…it appears to be working.
I need to get it out and test it more, but so far appears to be working. Compass baro and all
@rickyg32 - Ok thanks. Have you seen the issue I reported in that ticket (repetition of the “APM Initialising” message)? Oh also, are you on a ChibiOS or NuttX build?
Hi @rmackay9,
In 3.6 is still that scaring behavior I’ve described in https://github.com/ArduPilot/ardupilot/issues/7435
I don’t know why no one else noticing that. May be it is only my use case…
Anyway, may be it will be possible to discuss the ticket internally and plan to fix it in some upcoming 3.6.x releases?
Hey there
I am on Chibios and the only issue I can see at the moment is the status LED color is messed up but Randy is telling me there is a fix in the 3.6 gold or 3.7 what ever it will officially be called.
The other observation is a number of different beeps that I am not use too. Seems that may have changed.
I hope to get out this weekend and give it a try again.
cheers
Sergery,
Re the throttle spike you’re seeing. I’ve created an discussion here. If you’re still seeing it with Copter-3.6 could you provide a log by any chance?
Building a x8 this week naturally i installed R-12 all seems ok overall but I receiving this error that went away now back. I think MP thinks the octo is moving when if just sitting still.
Bradon,
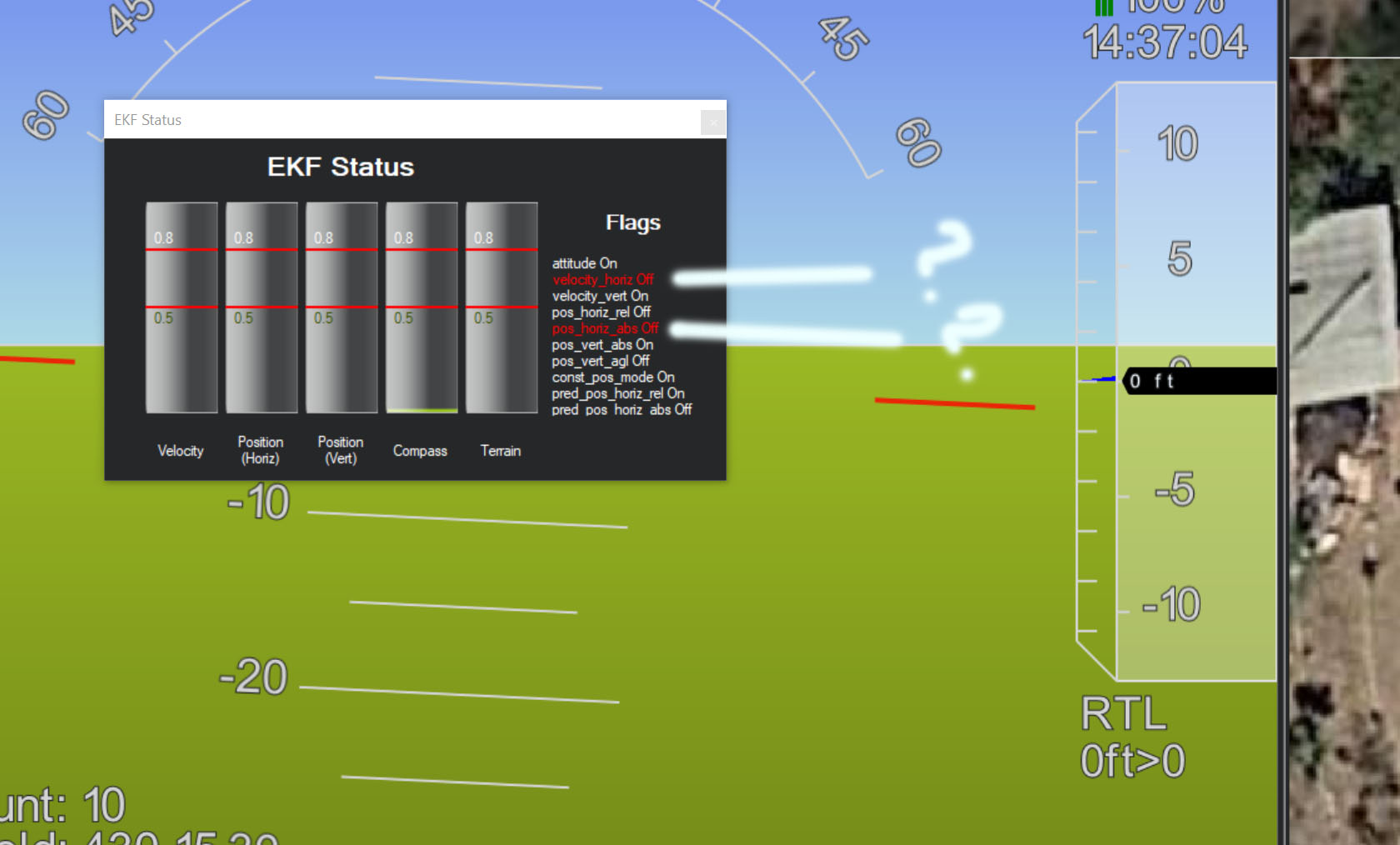
This is a report from the EKF that it does not have a good horizontal velocity or position estimate (yet). If this is appearing soon after starting up the board then this is normal but if it’s appearing during flight then it means the EKF is not happy and it won’t be possible to switch into modes like Loiter, RTL, Auto, etc.
1 Like
Thanks I was thinking the same I only noticed this recently. Seems to happen during setup and goes away outdoors/flying.
Arming beep. Having the same issue with a second Pixhawk classic in the video I forgot to hit the arm switch then armed via the radio. the tone is not negative. Thanks.
“https://www.dropbox.com/s/lrr7n6tbxnvjy81/IMG_2195.MOV?dl=0”
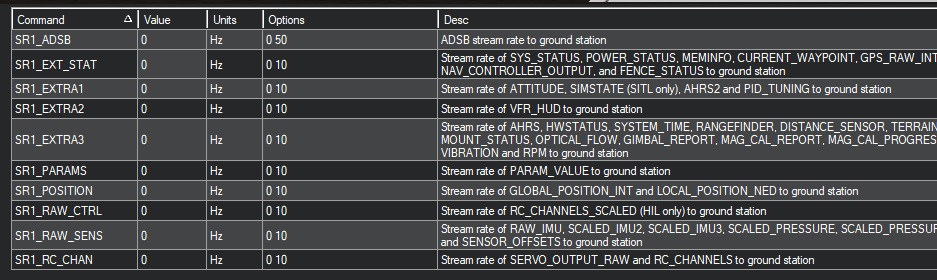
@rmackay9 I finally found the issue with Mavlink not working on any of the serial ports. All the stream rates are set to 0 by default so Mavlink cannot get the telmetry. I assume this default can be fixed in a release, or maybe it’s just the Matek target affected?
Thanks,
Jonathan,
Great that you got to the bottom of it.
Actually in Copter we set all the stream rates to zero by default on all boards. It saves some CPU time because we have a lot of serial ports and most of them aren’t connected to anything for most users.
The ground stations normally request the streams (and provide the rates) they want soon after they connect and then AP starts sending the data.
Brandon,
Can you check the ARMING_CHECK parameter? It’s possible to remove the safety switch from the check and then it will act as you describe. If that doesn’t explain it then could you set the LOG_DISARMED = 1 and reproduce the issue and then post the log here?
Txs as always for testing the betas!
Looks like this error seems to be confusing motor test. I had to go outside to get a GPS fix in order to test motor assignments for rotation on my work table indoors. I think we could need to be able to bypass this error in pre arm. if not Motor test does not function normally… unless I setting up the build in the wrong order.
Did test this one more time looks like I can’t do a Motor test with the EKF error flag. I only say this as it could be raining or I don’t want to let the cat bolt out the door at night.  Took me awhile to figure out what was going on.
Took me awhile to figure out what was going on.
Solved: It was set to 0 so that must be it. Thank you.
1 Like
Brandon,
The EKF situation definitely shouldn’t affect the motor test. The RC calibration does need to have been done though because by default, the PWM range used for the motor output is the same as the throttle channel input.
Yes I agree, if I have this EKF error shown in red above. Motor test is unhappy even will spurt the motors out of sequence. Once the GPS gets a fix by taking it out doors the motor test works well. I been setting up a x8 and a new Octo I think i can repeat even with the RC calculated and fully setup. It also gives me other error messages.
Here is a quick video showing the EKF error and motor test sorry for the quality, the x8 is setup and flying well.
1 Like
Brandon,
txs for the video. OK, I think I know what’s happening. the vehicle is in Loiter mode, during the motor test it temporarily arms the vehicle, the EKF failsafe then triggers and disarms the vehicle (because it’s landed). I think if you switch the vehicle to Stabilize or AltHold then it will be fine. Once you confirm then we can update the wiki docs.
Looks like that made it work " stabilize "however some spinning of the motors not selected are present. Test motor in sequence is the best…