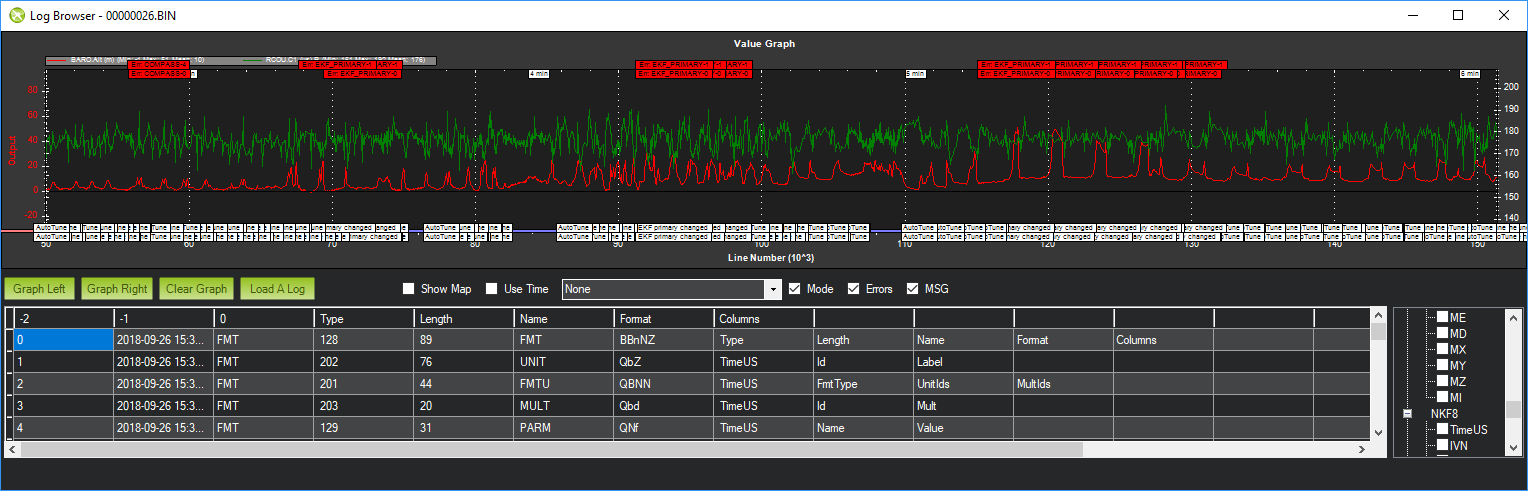
Running 3.6rc10 on my 180mm mini quad on a pixracer. Seeing some weird EKF behavior with the compasses - sometimes the innovations are there sometimes they are not (e.g. NK3->IMX). See the log below.
The external compass is disabled because the offsets are too high, so only the two internal compasses being used.
During a flight yesterday my copter preformed an RTL which i assummed at the time was a radio failsafe as this has happened a few times in the past. When reviewing the logs there was a radio failsafe but I can’t see where channel 3 falls below 970ms
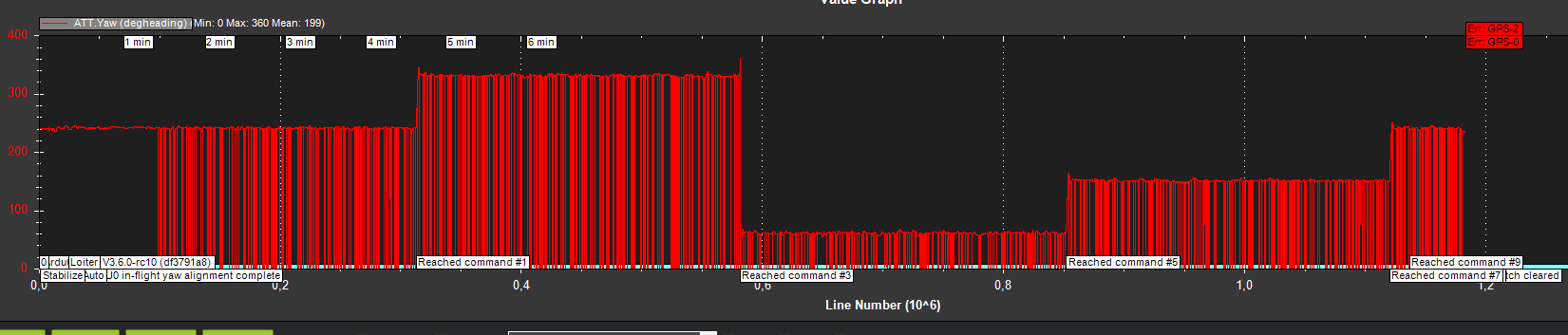
I’m trying 3.6.0rc10 and have noticed an error in the logging. It appears to randomly log a 0 instead of the actual value. I’ve noticed this for AHR2, ATT, BARO and possibly others. The actual flight appeared fine with good loiter performance. Anyone else seen this?
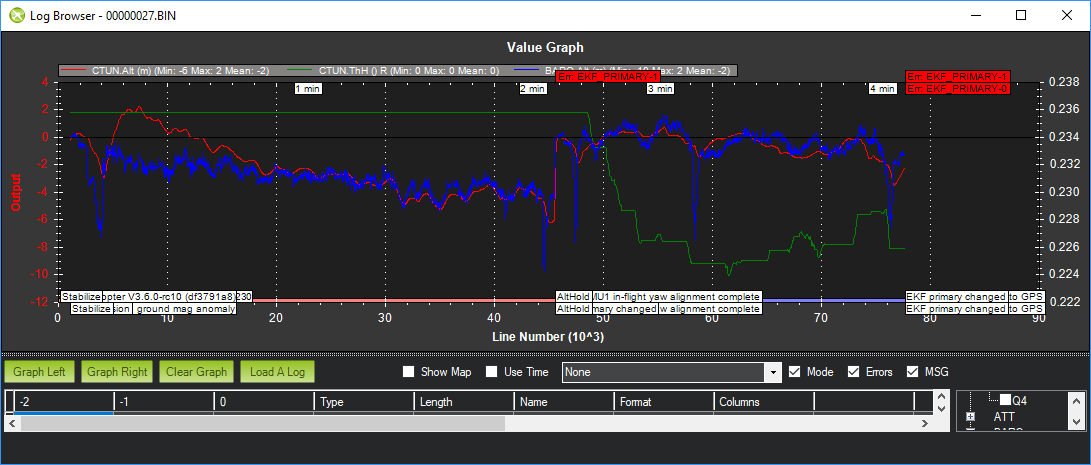
I’m using 3.6.0-rc10 and have switched to 4s on a 180mm quad with a pixracer and nuttx. I’m seeing some very weird behaviour that I didn’t see with 3s (or rc9) whereby the copter struggles to maintain a stable altitude in AltHold. You can see from my graph how the altitude keeps going up and down and I keep having to adjust. The copter is quite highly powered - I had to turn down the spin armed settings to stop it taking off when armed and shooting into the sky. If I fly in stabilize the throttle is very sensitive, so I wonder if its related to the power. Any way to make things more stable? You can also see the EKF keeps switching which probably doesn’t help - why might this be?
I turned them down to 0.75/0.35, but then it was even more unflyable so put them back up to 1/0.5. Maybe I went too little or too much? Not really sure what the right approach is here. It’s also pretty difficult to maintain a smooth altitude in stab. I managed to autotune so roll/pitch/yaw seem fine now.
I had a lot of trouble w/ alt_hold w/ my small copter… (3" props… 160mm frame)
I needed a lot of foam. Much more than expected. In your case, maybe the motors are giving stronger bursts of power, so blowing more air in the baro. (Hover in stabilize and see if the altitude readout makes sense… If so, it’s probably ok)
Vibrations caused a lot of problems. I had to soft mount the FC as much as possible. And, I have to use new balanced props. Once my props get a few chips, the vibrations increase enough to cause alt_hold problems again. (I’d never notice the damage in stabilize, but it definitely messes up alt_hold.) And like I said in a different thread, my vibes in mission planner are almost completely flat. (the the vibe readout on the hud). So, that’s not a good indicator of vibrations on these small copters. I don’t have an sd card, so I can’t offer more about that. But anyway, in your case, maybe the extra power is causing more vibrations.
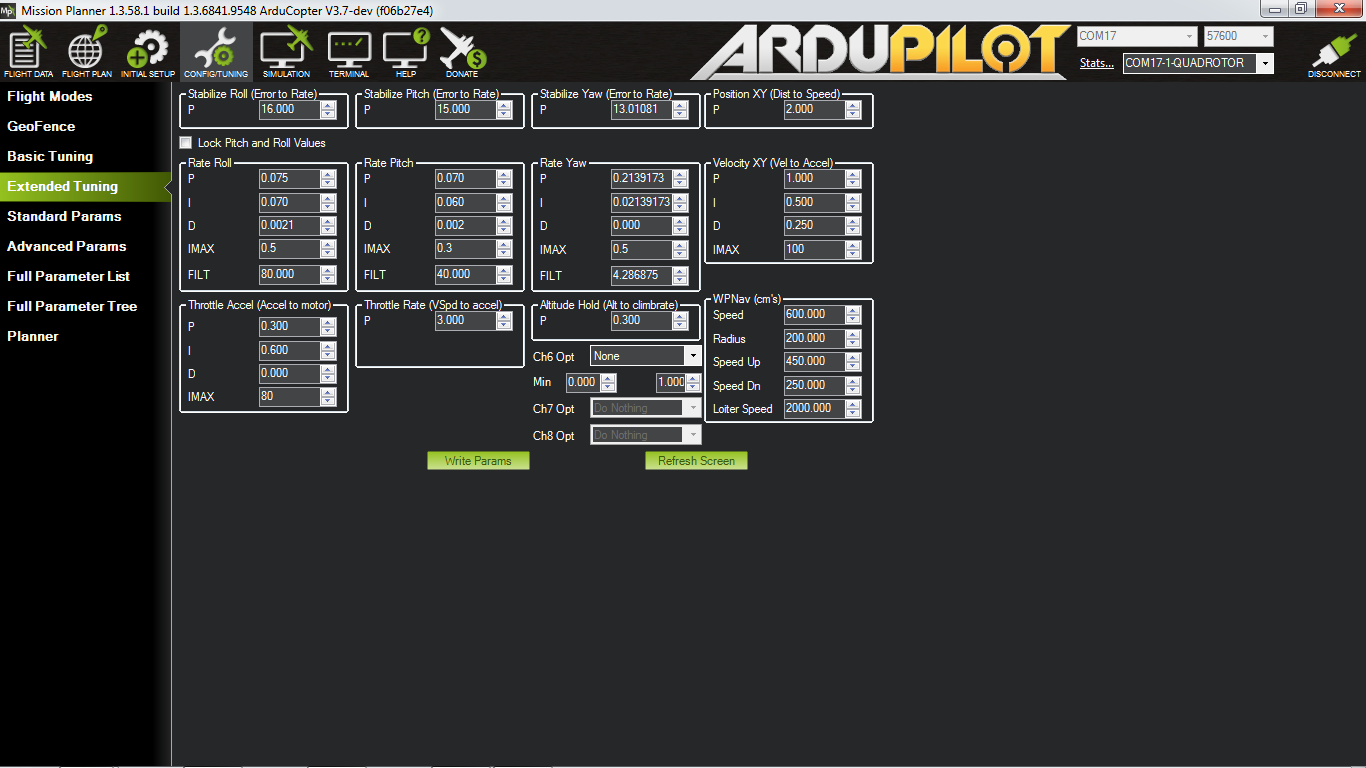
And finally, here is my tuning screen in MP… Still a work in progress. And I’ve only got 1103 motors and 2s batteries, so mine is weak. You’ll probably need lower PID’s for throttle and everything.
That’s what worked for me… It was really out of control when I started… to the point I broke the frame, GPS, and receiver while trying to figure it out! It fly’s great now, though.
I just thought of another more simple possibility.
Have you checked your throttle hover setting? (I forget the name of the parameter… I think they recently changed it)
If you haven’t manually gotten a good stable hover in stabilize, it might not have learned the new mid throttle level.
Ok will try foam next. But with 3s I had a nice stable hover - so seems a bit weird. I’ll try lowering my settings a little. Yours look a lot like the ones I have on my 250mm quad which were too high for the smaller quad. It’s learnt the hover throttle ok as far as I can tell.
Marty, Those are my latest PID’s from tuning yesterday. I keep going higher w/ the rate PID’s, and it gets better the higher I go. Better control. Less wobbles on descent. I’ll post my full parameter list in my “micro arducopter” thread in the next day or two. I have a little more loiter tuning and wpnav setup to do.
Andy, yes, like I said this one is relatively weak. It’s got higher rate PID’s than my 250 quad. I’d say to try my throttle and alt_hold settings if they’re lower than what you’ve got now. And you might need to go even lower. My rate PID’s probably don’t apply to your copter at all.
I don’t think the baro is the problem. Covered in foam and same issues. Tuned down the psc_accel, still same result. The hover throttle appears all over the place and its quite difficult to keep at a steady altitude in stab. In althold the motors sounds like they are pulsing - I just wonder whether the hover throttle is so low that there isn’t enough control in the esc’s to maintain a stable hover. Is that possible?
This could help you. Motor pulsing at low throttle sounds like autopilot could not control motors precisely at low rpm as the control/lift ratio is not as expected.
But, then again if the motors are pulsing then I’d say the Roll and Pitch PIDs need some tweaking.
I’d start with zeroing out the D and I terms and then use In Flight Tuning to get the individual P terms adusted for minimum overshoot when you flick the right stick in Roll or Pitch.
Once you get the P terms dialed in, do the same thing with the D term, but here you are going to raise D until the aircraft starts to “buzz”, and then back off until the buzzing stops. Then you can go back to the P terms and bump them up a little more…
I try a radio calibration in MP. I seen this if you are using another radio. Regarding the battery I seen issues on small quads that had s3 that were resolved using s4 this could be throttle settings and yes small quads are hard to tune somedays.
@rodger,
I’ve looked through some other people’s logs and I don’t see the random zeros appearing. My guess at this point is that the messages are being corrupted on the SD card. Maybe try changing the SD card?
Sorry for the slow response.