Took the day off because it was sunny and flew 8 batteries  In general copter is now flying well - have not seen any more EKF issues, but have these three really concerning problems:
In general copter is now flying well - have not seen any more EKF issues, but have these three really concerning problems:
-
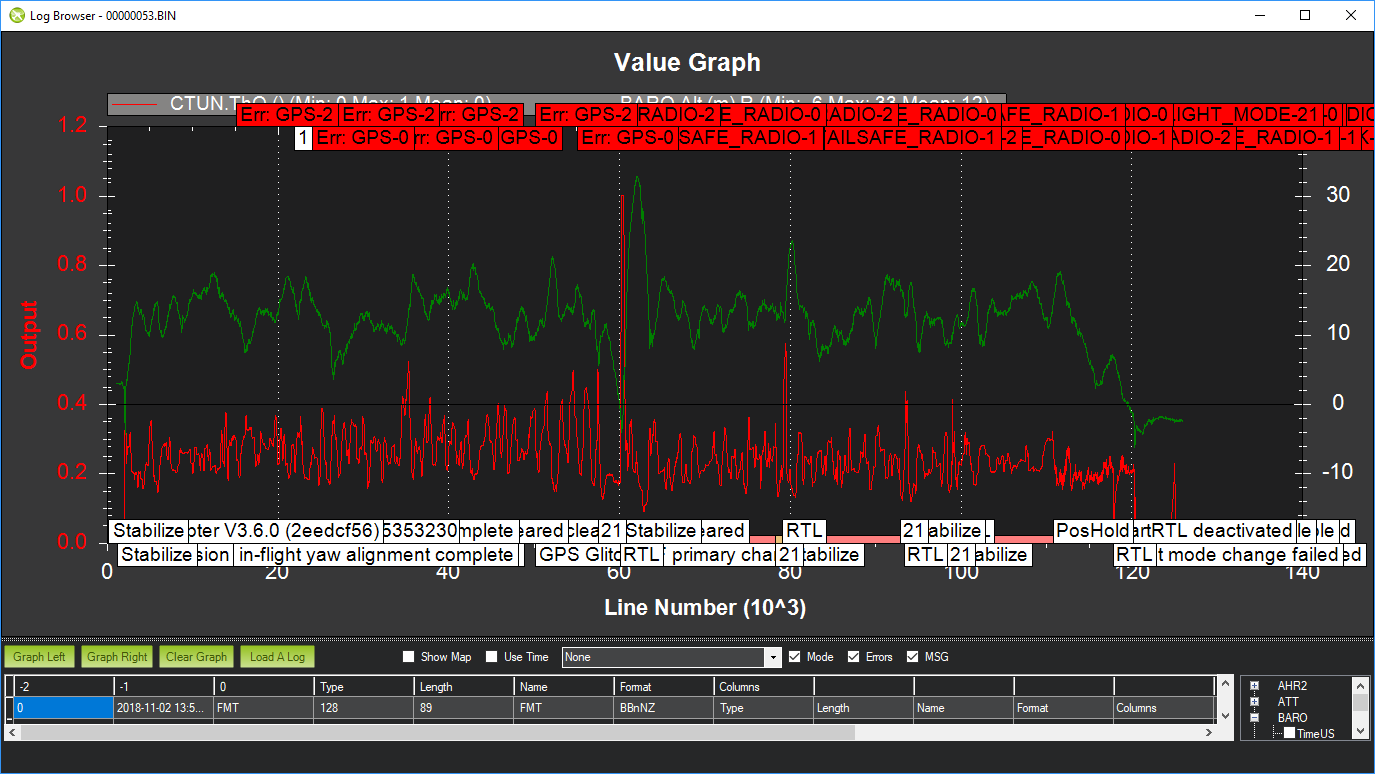
I am getting a lot of radio fail-safes, not sure if this is hardware or software - they clear quickly - I tried mounting the aerials better (I have a lemon diversity rx) but makes little difference, but when this occurs it tries to switch to M_21 (that’s what it says in my OSD) and then tries to land. I have to quickly flip modes to recover. Graph and log below. What is “M_21” and how do I set the radio fail-safe to something sensible? APM Planner says that a radio frame was delayed and it could not initialize the fail-safe. If I switch off the TX all works as it should (RTL). Can I increase the timeout somehow?
https://www.dropbox.com/s/bw0ptkrmtqeldox/00000053.BIN?dl=0
-
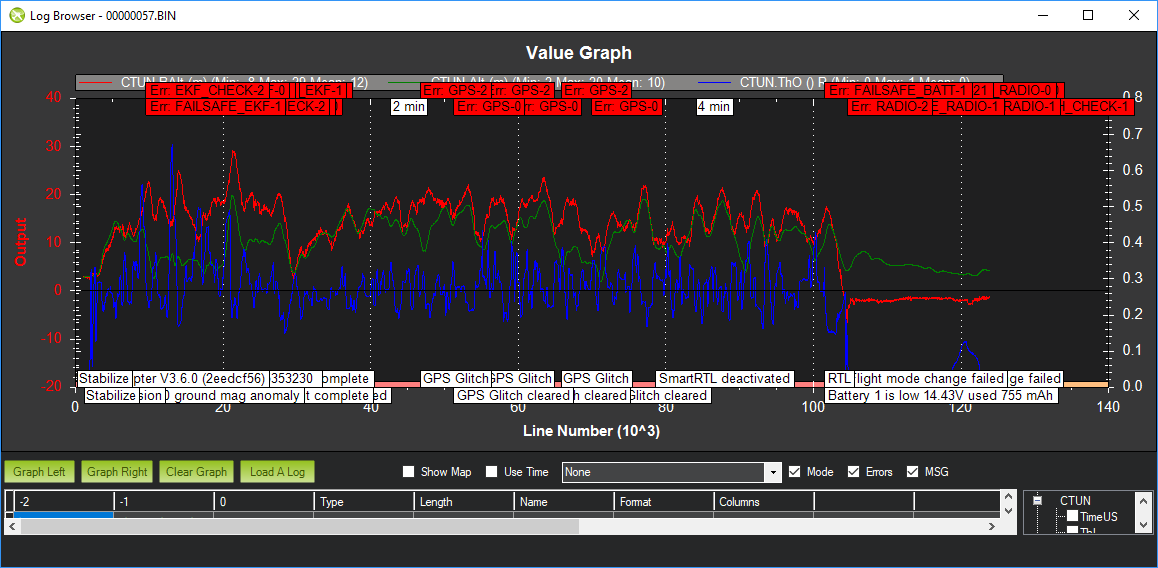
My altitude is all over the place. HAlt in my OSD display seems to flip between 5m (relative?) and 190m
(msl?). Doesn’t matter in stabilize but causes all sorts of problems in RTL where the copter keeps trying to descend rather than RTL. However if I deliberately RTL all is fine. Also see Altitude in MinimOSD relative to Sea level ?! I may be confusing two issues here. Second log and graph also below.
https://www.dropbox.com/s/olhophn5wq9zdu3/00000057.BIN?dl=0
-
What @Paul_Atkin1 says - copter often does not detect it has either landed or crashed and the motors keep spinning and I cannot disarm