We ran into this same issue with Copter 3.6.0 and Rangefinder EVO 60m sensor.
We completed two waypoint flights - first without EVO sensor, and second one with EVO. Attached Pixhawk data logs of both flights. Times (for example :33s) mentioned are timestamps on the flights logs.
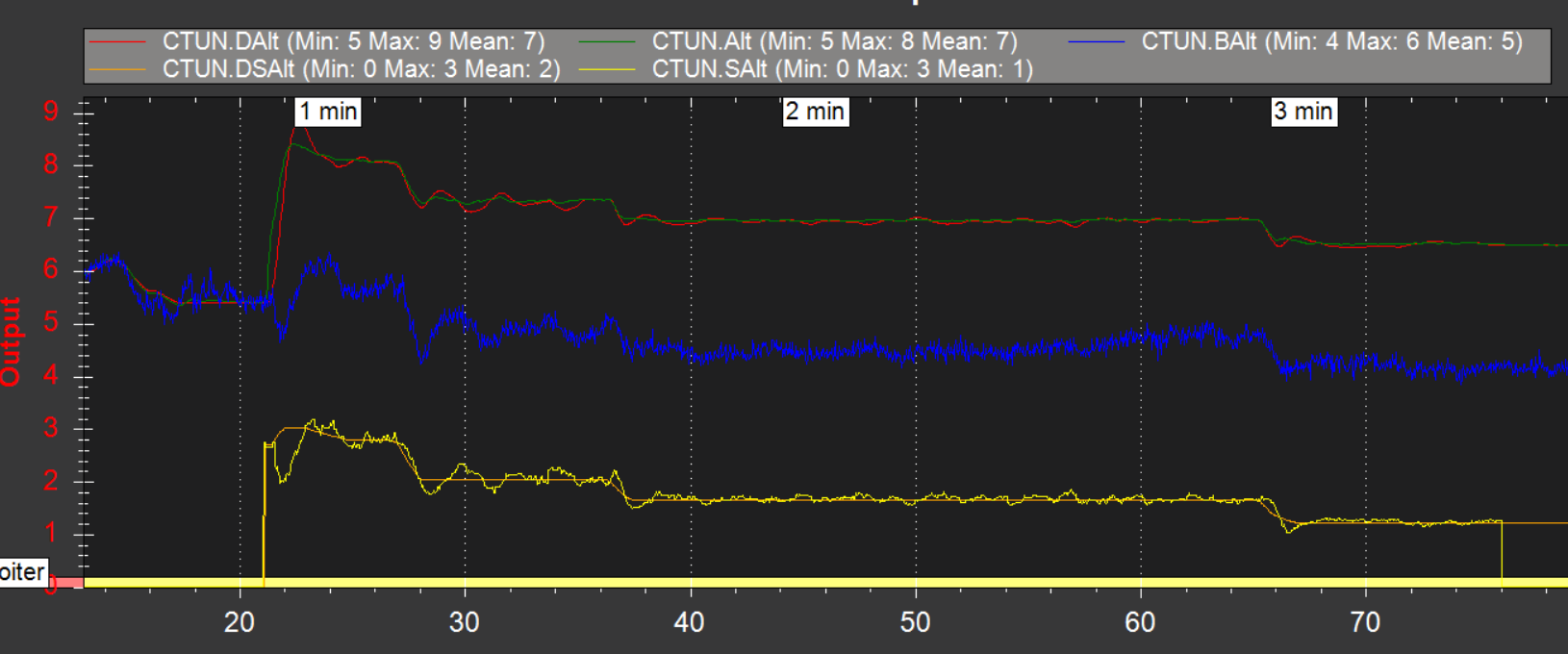
Both times we takeoff to 40m altitude, fly short waypoint mission and on last waypoint descend to 7m and then ascend back 40m and do this twice and then do RTL. On our first flight (without EVO, using barometer for altitude estimations) everything went smoothly - our drone flies at around 43 meter altitude and acts normally. It starts to descend to loiter point (:33s), goes from 40m to 10m altitude (:82-:92sec) at the speed of 1.25m/s, stays at 7m altitude for 15 seconds and then heads to next round, does that and returns to launch normally.
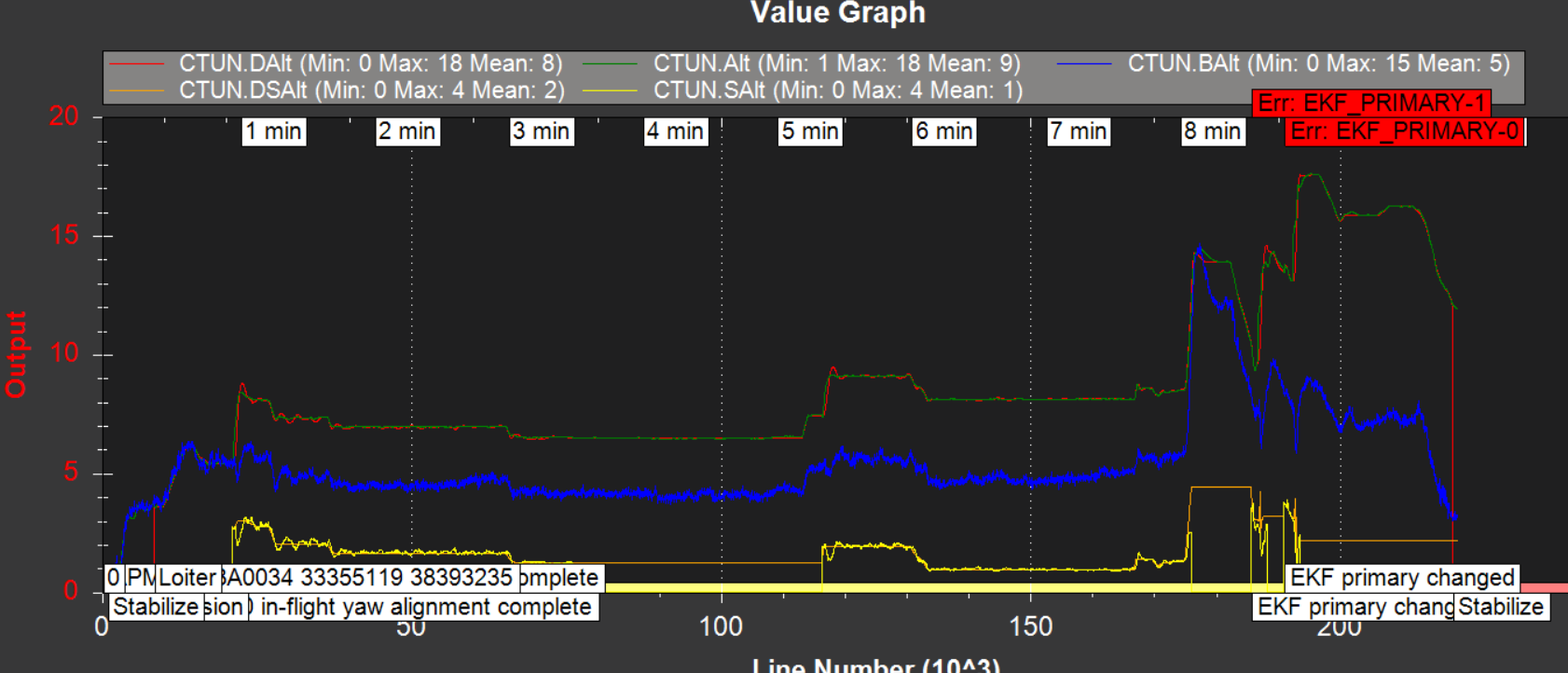
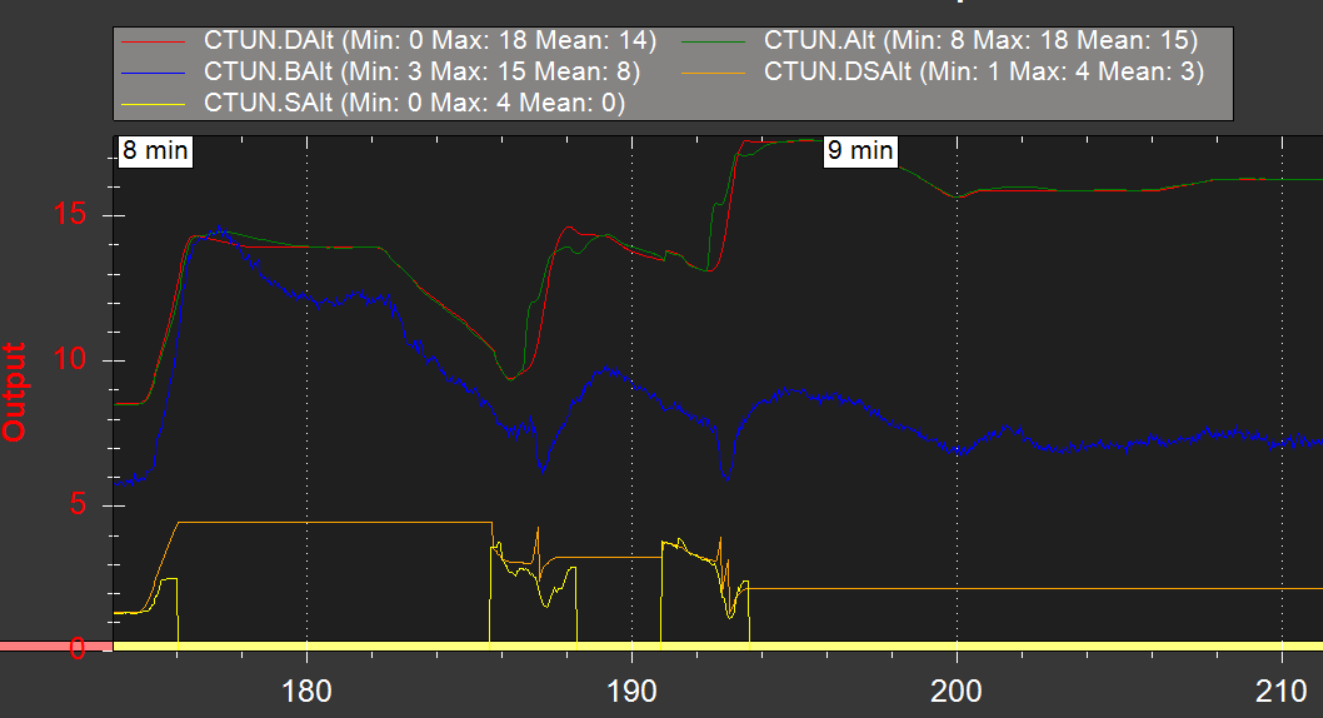
With EVO sensor we planned to do two rounds like previously. Drone flies little higher (45m, because of sensor?). Drone starts the descend from 40m to 7m (:43s) instead of landing at smooth speed it comes down at 7m/s. After that pilot sets the controller mode to LOITER to take manual control of the UAV. Even after that the drone doesn’t respond normally, there is some kind of latency in throttle so it seems like the rangefinder also causes issues on the manual flight mode (LOITER). It was pure luck that during this flight the UAV survived and didn’t crash to the ground.
We first asked from the sensor manufacturer (Terabee) about this problem, and their answer:
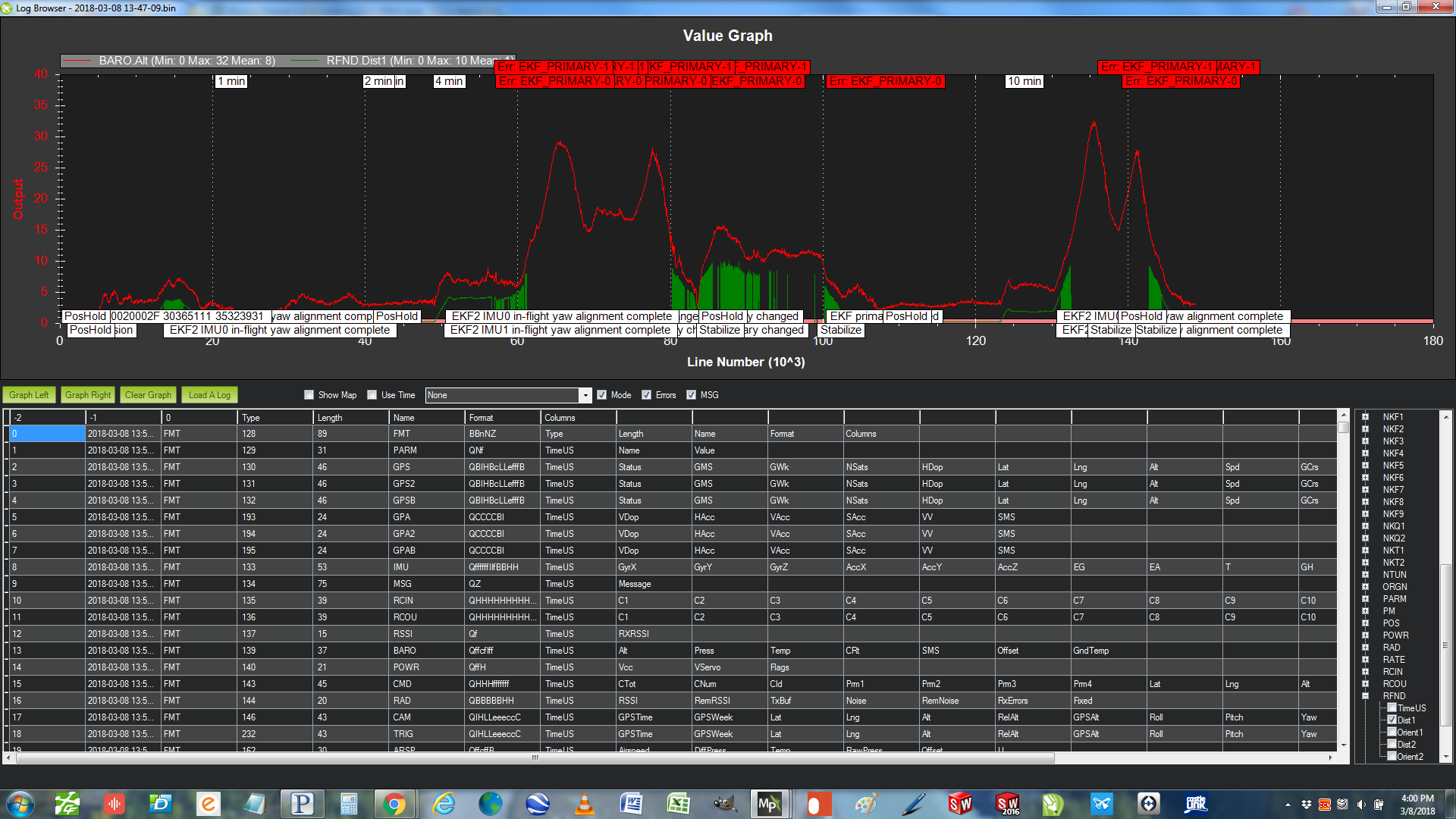
Thanks to you, we have had the chance to look deeper into what’s happened during your flight and found that the issue is with the APM control loop for the use of rangefinders as altimeters. What is happening is that, when the sensor doesn’t send a distance data, the system should switch to rely on the barometer for altitude hold, but it appears that it doesn’t correctly execute this transition.
It is the first time that one of our customer reports such issue and this transition used to work well. What I would recommend though at this point in time is that you post your in-flight data on ardupilot for the community to jump on it asap.
From the google drive link (https://drive.google.com/drive/folders/1YnXkkwQ3BTuOP-n6dDjav6STAL44UilH?usp=sharing) you can find following files:
00000080+Barometer.BIN - pixhawk flight logs from the flight without EVO sensor
00000081+RangeFinder.BIN - pixhawk flight logs from the flight with EVO sensor
20181119 Avartek+RNGFND.param - pixhawk parameters during the EVO flight
Avartek Pohjoinen+Loiter_Time.waypoints - mission waypoints