After a couple of weeks of beta testing, Copter-3.4.4 has been released. This is a release has several improvements/bug fixes.
a) prevent unwanted EKF core switching at startup
b) helicopter prevented from taking off in position hold mode before rotors at full speed
c) battery resistance calculations fixed
d) avoid unnecessary parameter change notifications to ground station
e) default power module definitions for Navio boards
f) on-board compass calibration capability bit added (tells ground stations that onboard calibration is supported)
Item (b) is the most serious but only affects helicopters. Helicopter users, especially those that use PosHold mode, are strongly recommended to upgrade.
The next most important item is (a) which affects all users. In short, in Copter-3.4 we have two EKFs running at the same time each one uses a different IMU (Copter-3.3 had a single EKF which used both IMUs). This bug fix reduces the possibility that we will switch to the 2nd EKF. In general, on a Pixhawk, the first EKF provides better results because it’s using the Invensense IMU.
Randy,
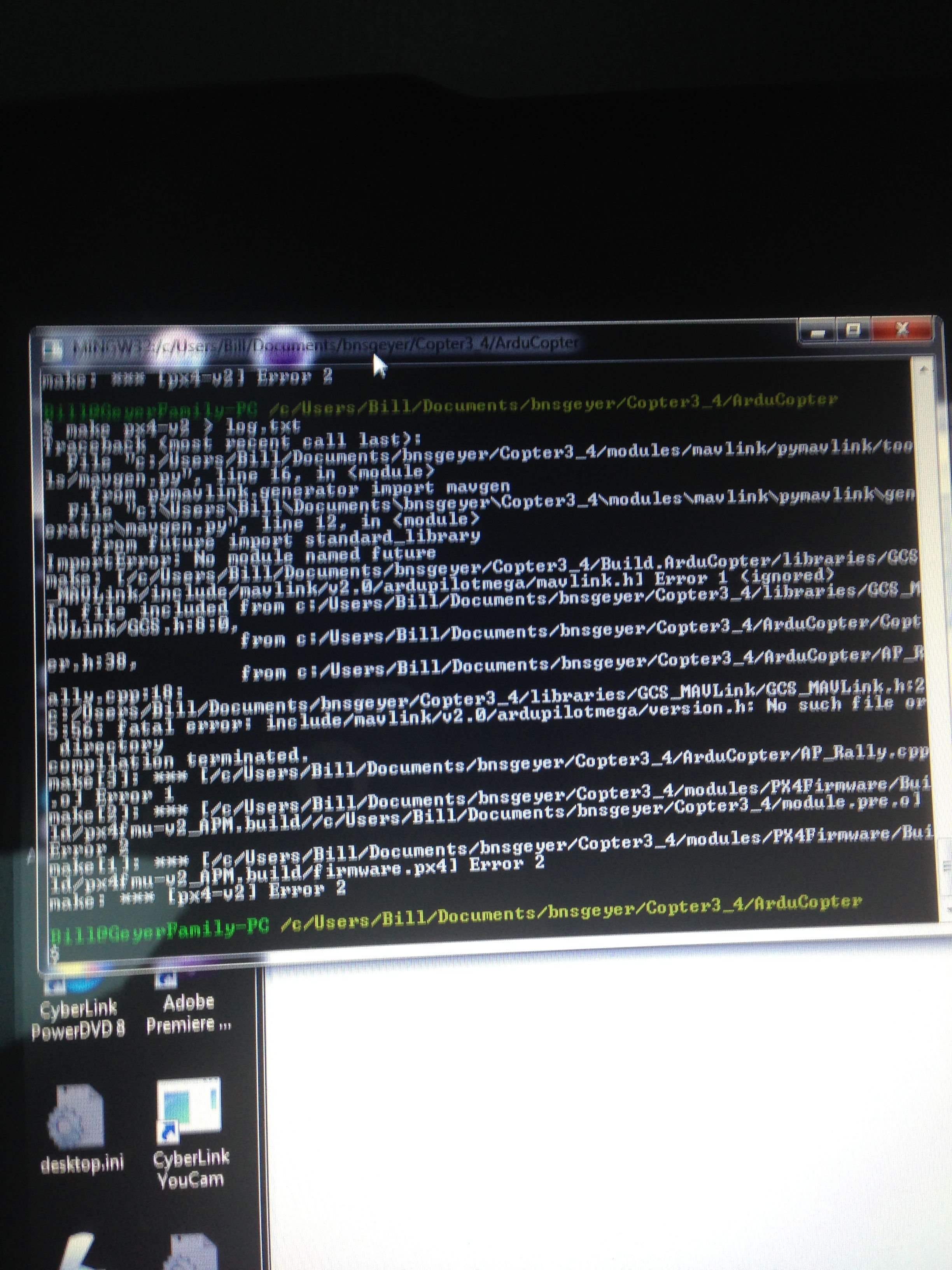
In an attempt to compile the Copter 3.4.4 software, I am getting the following compile error. I’ve attached a log file where I pushed the echo to this file. It worked up to the last point where it sees the error. log.txt (21.5 KB)
Hi Randy,
Today I updated my copter 3.4.4 software, copter flying perfectly, but when I change flight mode
copter falling and I have to change to stabilize mode and full throttle for salvation my copter
where is the problem? 2016-11-12 14-56-23.bin (1.2 MB) 2016-11-12 14-56-23.log (2.6 MB)
You would better served by starting a new topic with your request.
It would be seen by a lot more people and get more attention.
I had a quick look at your log but I am not up to speed with EKF issues and you are not logging RC in or out.
Is your hover throttle at the centre? If not, this causes problems when changing modes.
It might be worth your while to update from 3.3.3 to the latest stable release as there were a few issues with 3.3.3
@bnsgeyer, to fix the compile problem, i think you just need to download and install the latest pixhawk-toolchain. It’s linked from this page. http://ardupilot.org/dev/docs/building-px4-with-make.html. Hope that helps. If it doesn’t, maybe try uninstalling the currently installed pixhawk-toolchain and then re-install this latest one. That extra step shouldn’t be required but just in case.
@Andre-K,
Thanks for the reporting on the missing builds for Y6, Hexa. It was a mistake in our build scripts introduced recently. Tridge has fixed and hopefully the other vehicle builds will arrive shortly, thanks!
@ReadyEdi,
Looks like this log is from AC3.3.3 which is very well tested and really shouldn’t be reported in this AC3.4.4 release section.
It looks like some of the logging information is turned off (LOG_BITMASK) so it’s a bit hard to tell but I think the issue is the buzzer. I’d recommend moving it away from the flight controller or remove it completely.
By the way, if you choose to upgrade to AC3.4.4, you can disable the buzzer by setting the NTF_BUZZ_ENABLE parameter to zero.
@bnsgeyer, I think it should be safe to upgrade to the newer pixhawk-toolchain and still be able to compile the AC3.3 branch. I haven’t specifically tested it but it should be fine.