I checked it now and it is released.
Thank you.
Randy,
The toolchain upgrade worked and was backwards compatible with AC 3.3.3. Thanks for the help!
@pmshop,
“Close Encounters” plays when it upgrade the I/O board’s firmware (the Pixhawk & Pixhawk2 actually have 2 CPUs on the flight controller). We didn’t need to make any changes to the I/O board’s firmware with this release so if you’re upgrading from AC3.4.3 I’d expect the regular boot sounds (which I guess is what you heard).
@hirochi, @bnsgeyer,
Great news on both fronts!
test motor sounds with different mot_pwm_type modes.
The best sounds in normal and oneshot modes. Oneshot125 very noisy.
FW 3.4.4 FC F4BY
50%throttle from motor test tab in Mission planner
I don’t know if that’s normal or not, but that board isn’t supported yet.
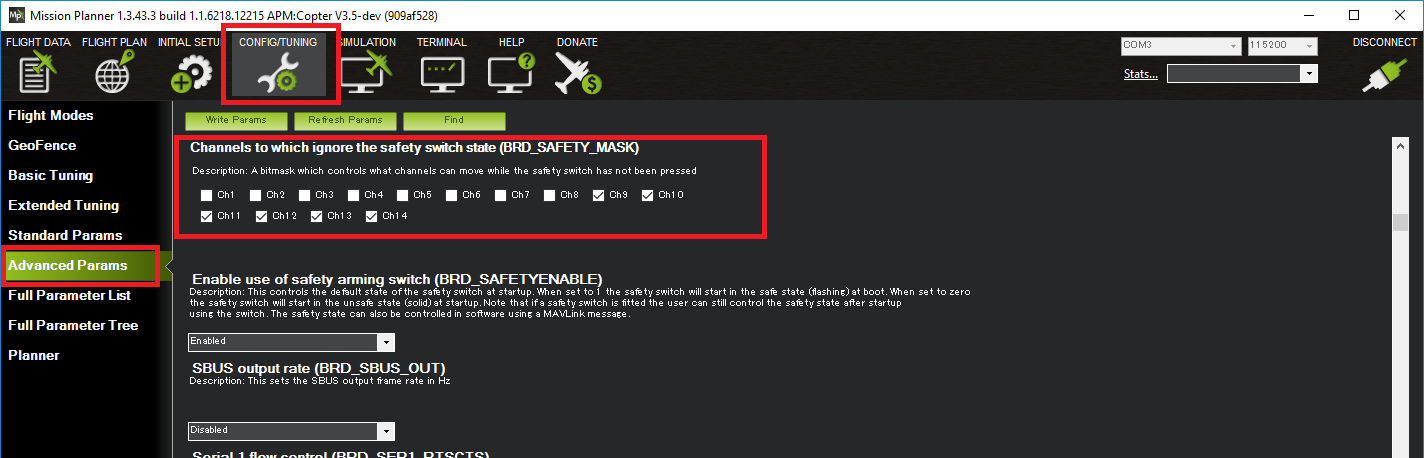
Why the copter v3.4 otca under pixhawk aux1 - aux6 no PWM, after the safety switch to unlock
It appears changes in 3.4.4 render the camera feedback function (CAM_FEEDBACK_POL) unusable, switching back to 3.3.3 fixed the issue for me.
@a123456, in copter, there should be output on the pwm channels even before arming if they’ve been setup for controlling a gimbal, landing-gear, etc. It’s configurable however using the BRD_SAFETY_MASK parameter. The easiest way to change this parameter is to use the mission planner’s Advanced Params screen.
Been trying to narrow down what might be causing error message “gyros still settling” during prearm check. I also tried to disable the prearm check but still got the message. Could I have a parameter set wrong causing this? I did try swapping out gps/compass but have not yet tried swapping Pixhawk (not P2).
For what it is worth, I reloaded default parameters and things seemed to settle down. Ran into some throttle issues but that is more straight forward to deal with (at least it seems so). Is arming now.