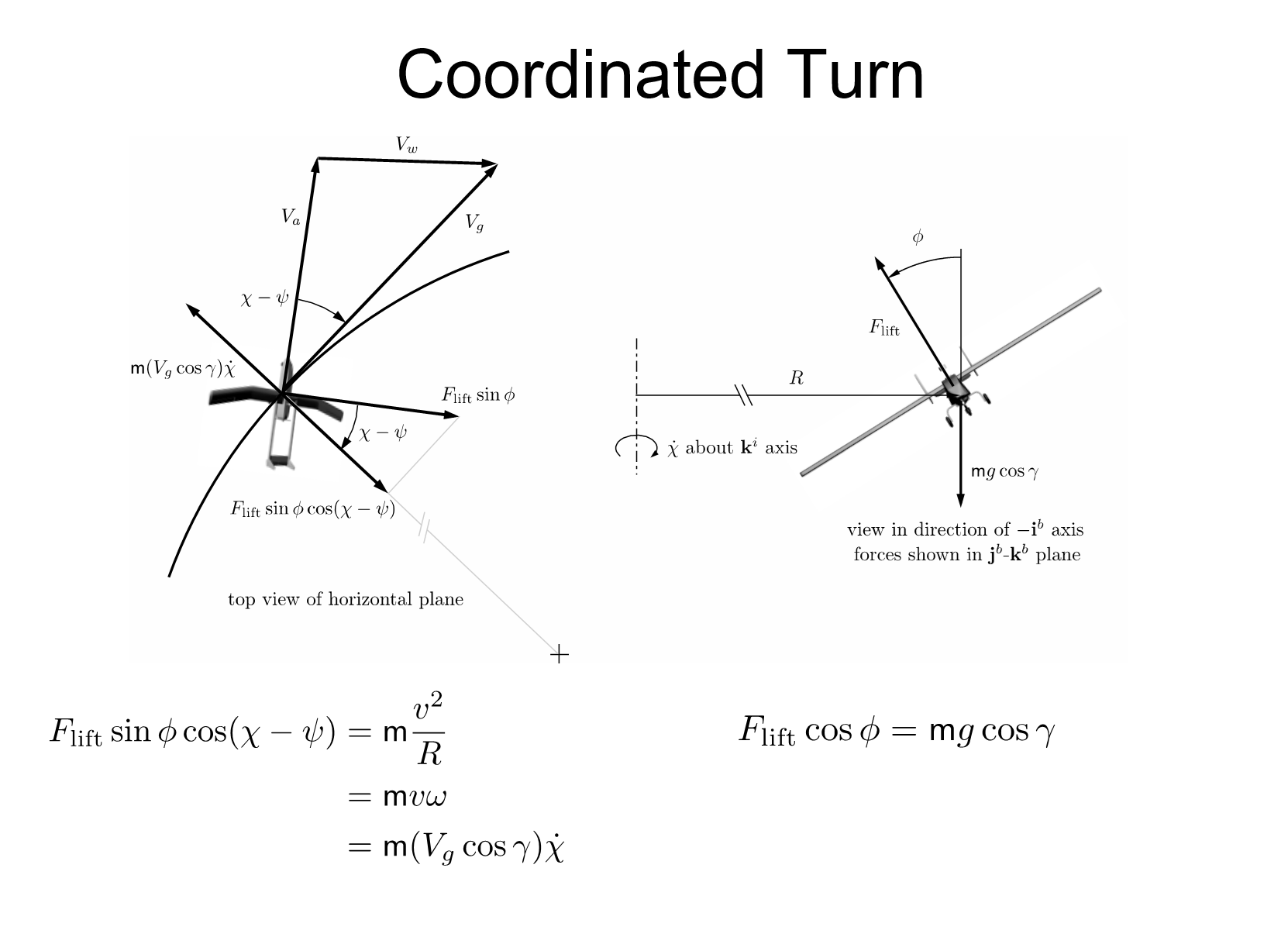
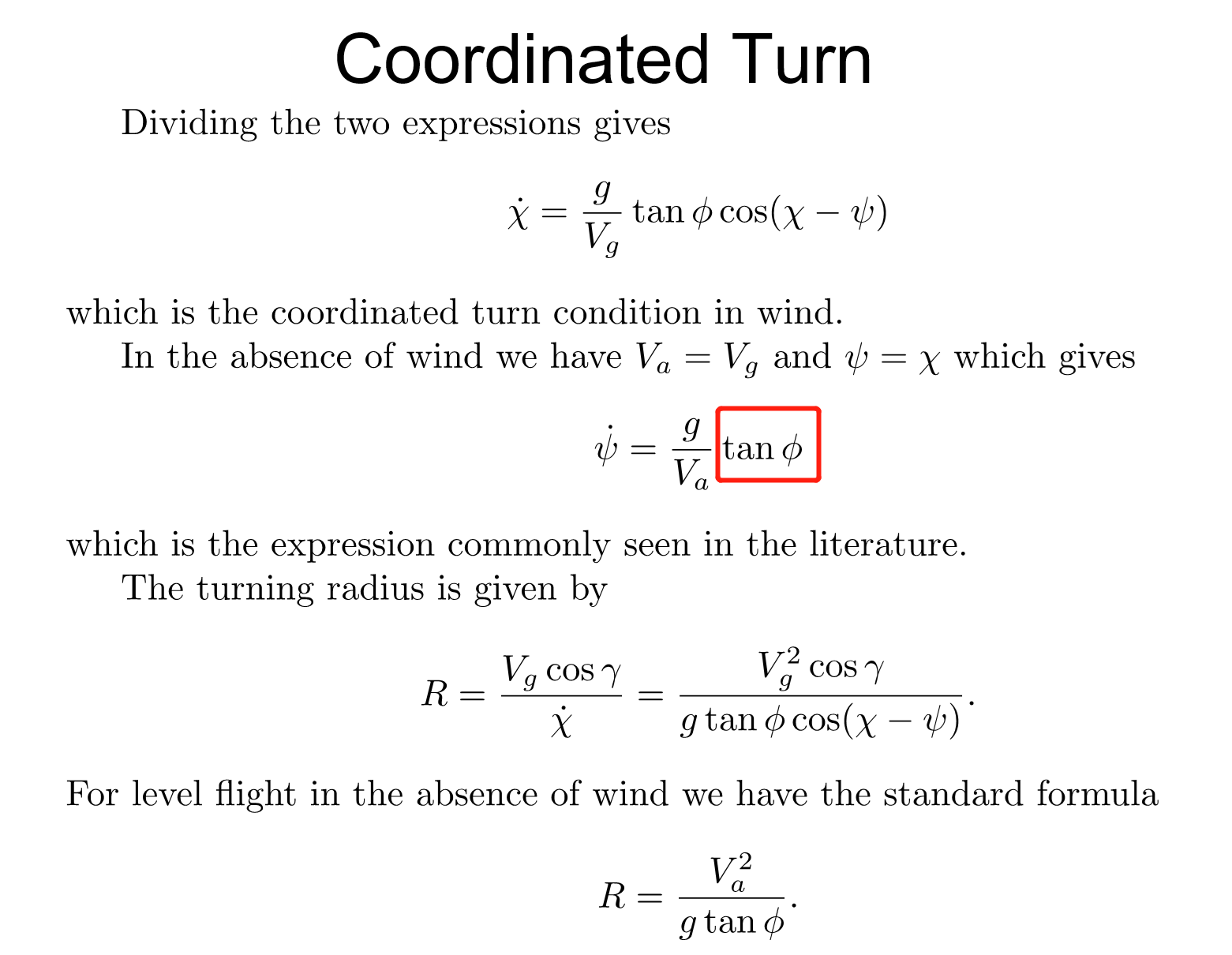
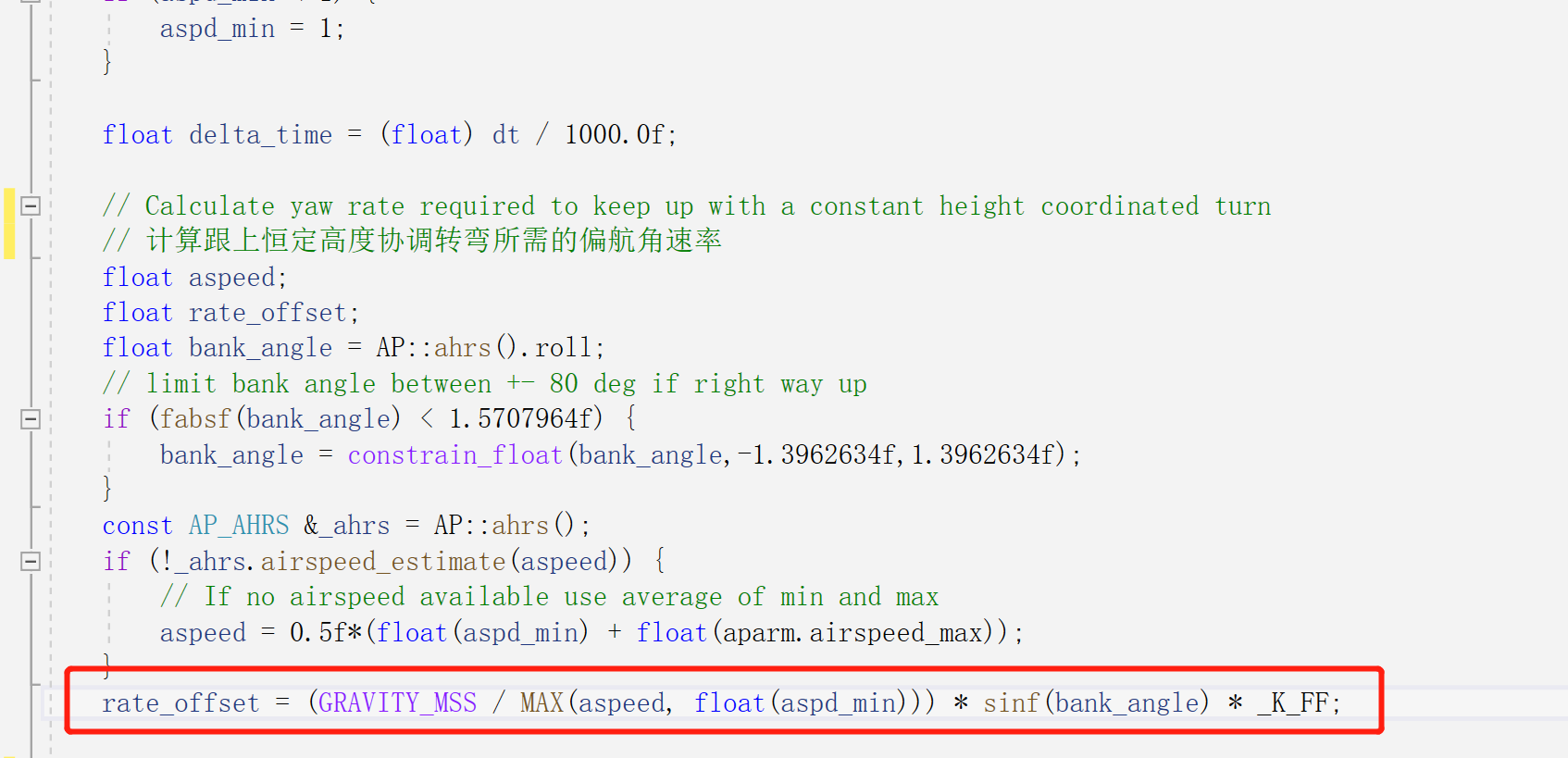
hello everyone, recently i am learning the yawrate controller ,i noticed that in the function “int32_t AP_YawController::get_servo_out(float scaler, bool disable_integrator)”,there is a formula that calculating the desired yawrate, it is “rate_offset = (GRAVITY_MSS / MAX(aspeed, float(aspd_min))) * sinf(bank_angle) * _K_FF”. I wonder it is right?,because i find this formula not equal to that in book.In book it is “rate_offset = (GRAVITY_MSS / MAX(aspeed, float(aspd_min))) * tanf(bank_angle) * _K_FF”;the difference is sinf() and tanf()