Dear All,
purpose of this new topic is to apply ArduRover to conventional RC submarines. In contrast to AUVs / ROUVs, classical submarines run on regular RC equipment (40 MHz /Europe; 70 MHz US). ArduSub is thus of no use. Building static diving submarines for 15 years I initially implemented ArduCopter to achieve stable cours keeping capability because a submerged sub is barely visible in the pond. The heading-hold function of ArduCopter (traditional helicopter, APM 2.6) worked quite well. But higher order modes were not feasable because its a sub - and not a copter. Thus I switched to ArduRover (4.0) running on a PixRacer flightcontroller.
Current project:
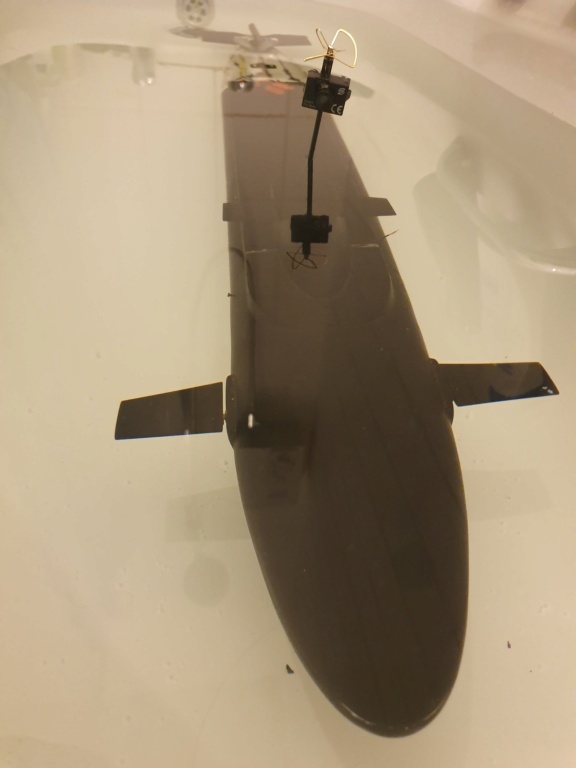
Sub: Oscar Class (Russian SSBN) / scale 1:100 / length 170 cm / beam 18 cm / weight 15 kg / RC operated ballast tanks / calculated (but luckily not yet tested…) max diving depth 10 m.
Flight controller:
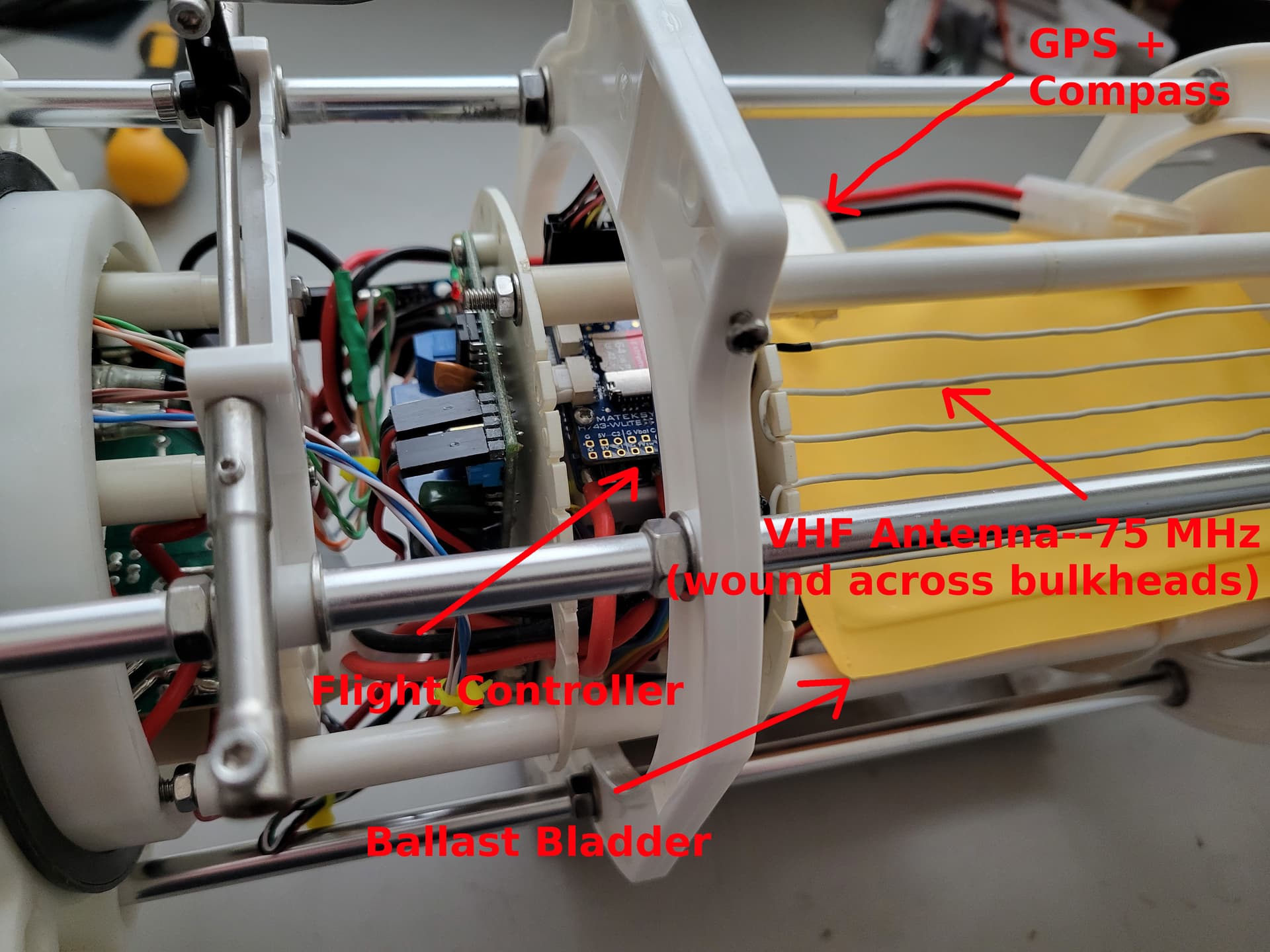
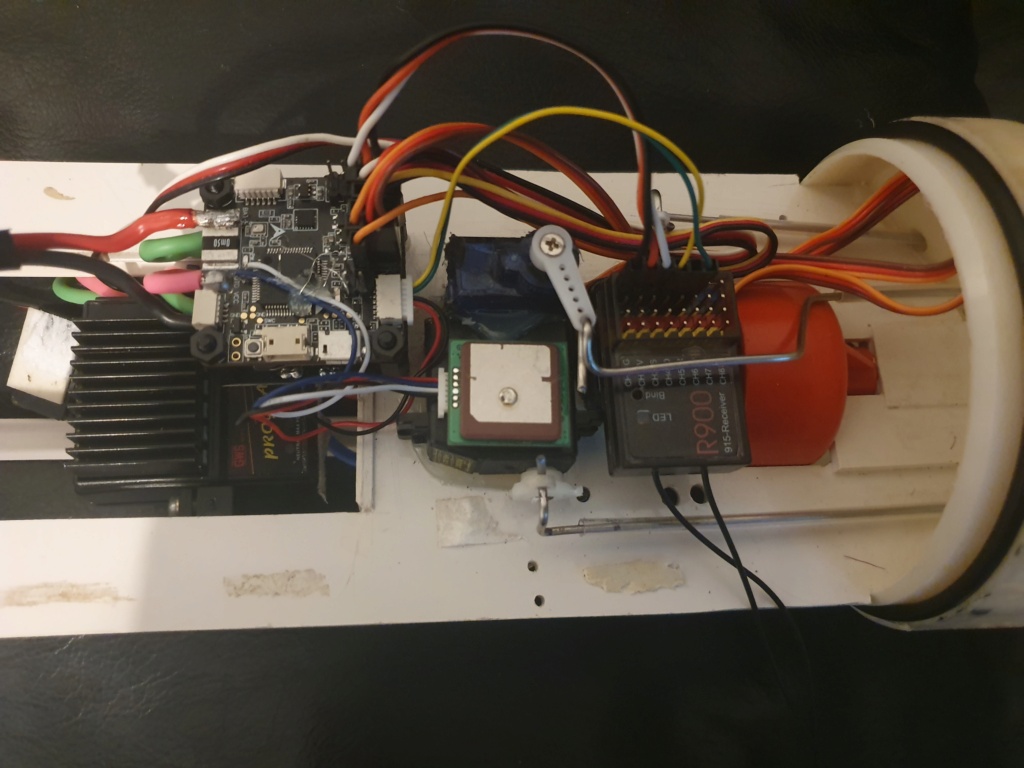
PixRacer / ArduRover 4.0 / boat configuration / GPS antenna housed in conning tower) / internal compass / SIC radio 433 MHz (works well up to 2 meters diving depth)
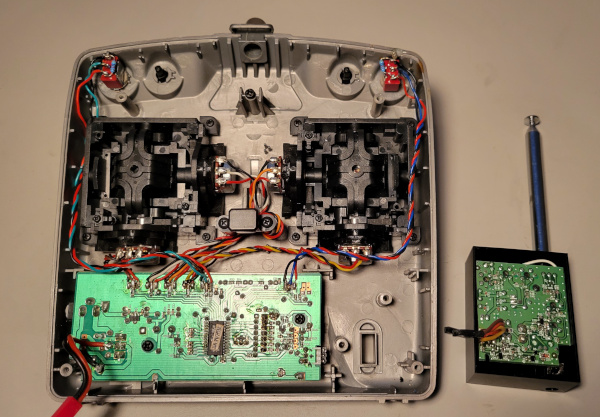
RC gear:
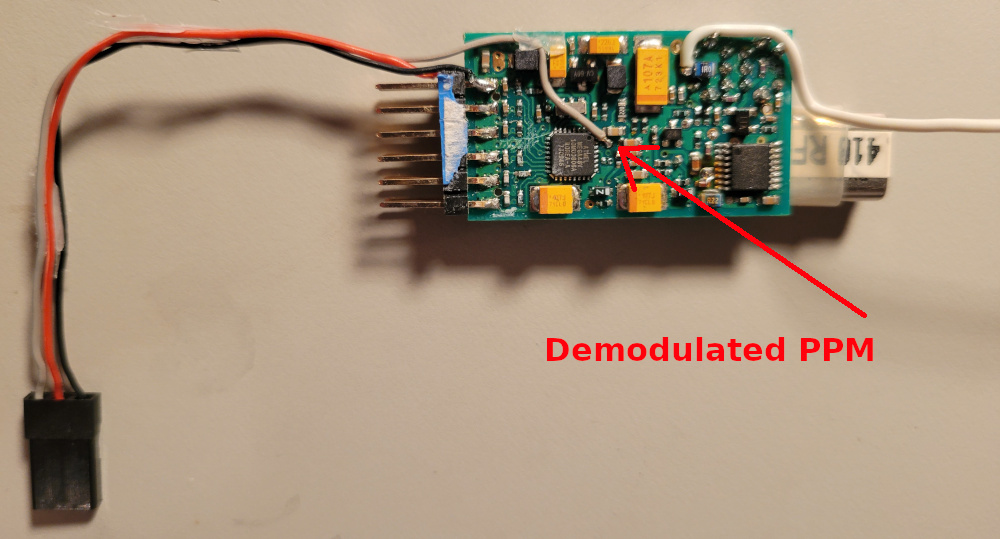
Futaba RX30 RT / 12 channels - DSL RX / 40 MHz band
Status:
All modes stable under surfaced conditions; heading-hold function in acro and steering mode proves far better than with the previous APM2.6 / ArduCopter combo. Manual mode works surfaced and submerged. Strictly GPS dependent modes dont work under submerged conditions. This was clear from the beginnig and poses no problem.
Final issue to be resolved:
Acro and Steering mode dont work with the sub submerged. I suspect this is due to the lack of speed information - which is provided by the GPS - that receives no signals once its submerged. But I´m not sure whether thats correct - there might be other reasons I´m not aware of…
Solutions I thaught of:
- add the option for acro mode to accept direct throttle input instead of using speed measured via GPS; this feature was implemented for skid steering vehicles I guess (?)
- add additional airspeed sensor funtionality to measure submerged pressure and calculate speed via Pitot tubing - airspeed sensors are available for sailboats only
Solving this final issue would create an entirely new application for ArduPilot and make ArduRover instantly usable for the entire community of conventional RC subs drivers.
I´ve uploaded current parameter files, dataflash logs, t-logs plus videos and pics here:
https://www.magentacloud.de/lnk/lViglwVx
https://www.magentacloud.de/lnk/JqCgFApa
https://www.magentacloud.de/lnk/xIigFbFf
https://www.magentacloud.de/lnk/NCCAFlwU
https://www.magentacloud.de/lnk/IBCAFJmg
Regards,
Theo