Hi Pete,
In my last message to you and Greg, I told the good news that my tracker started to pitch, but further testing shows
the tracker pitches back and forth, as shown in the video with link below.
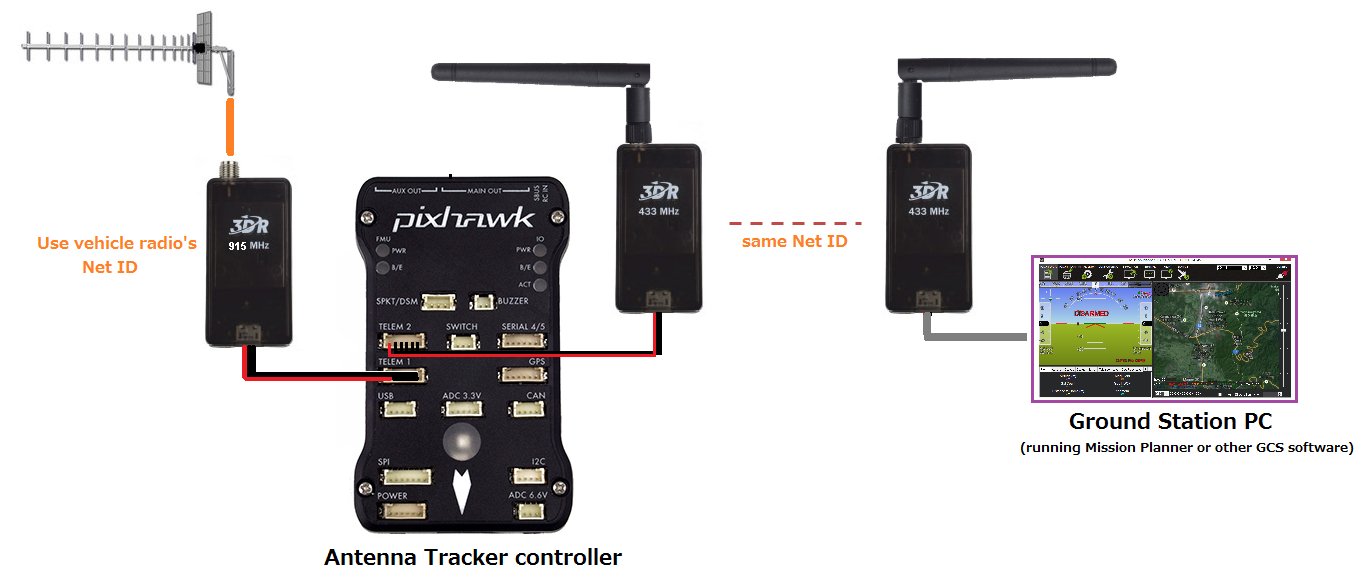
You asked the log in earlier message. I don’t have the log available as I found out the SD card slot of my tracker controller
(Pixhack, same as Pixhawk)
is probably damaged, and I can’t insert the card. I will figure out what to do to get the log for analysis.
I resend the param file of my current setting to see if you can figure out why the tracker pitches back and forth.
Another point which puzzles me : 10 seconds after start of the video, the tracker sudden beeps, and the green LED turns from solid to blinking, meaning disarmed.
Even though it disarm, the tracker still pitches and yaws.
This disarming started to happen 2 days ago. I swear I did not change any param value. It just happened by itself, and is repeating everytime several seconds after I press the safety switch to arm.
But wiki says "
Flashing green: Disarmed (ready to arm), GPS lock acquired. Quick
double tone when disarming from the armed state."
And if you turn on the loudspeaker, you only hear one short beep at 10 second, instead of “Quick double tone”. Do you have any clue ?
https://drive.google.com/file/d/19QocGca6jTSlhjPJb5kKM_YlzW1yUDef/view?usp=sharing
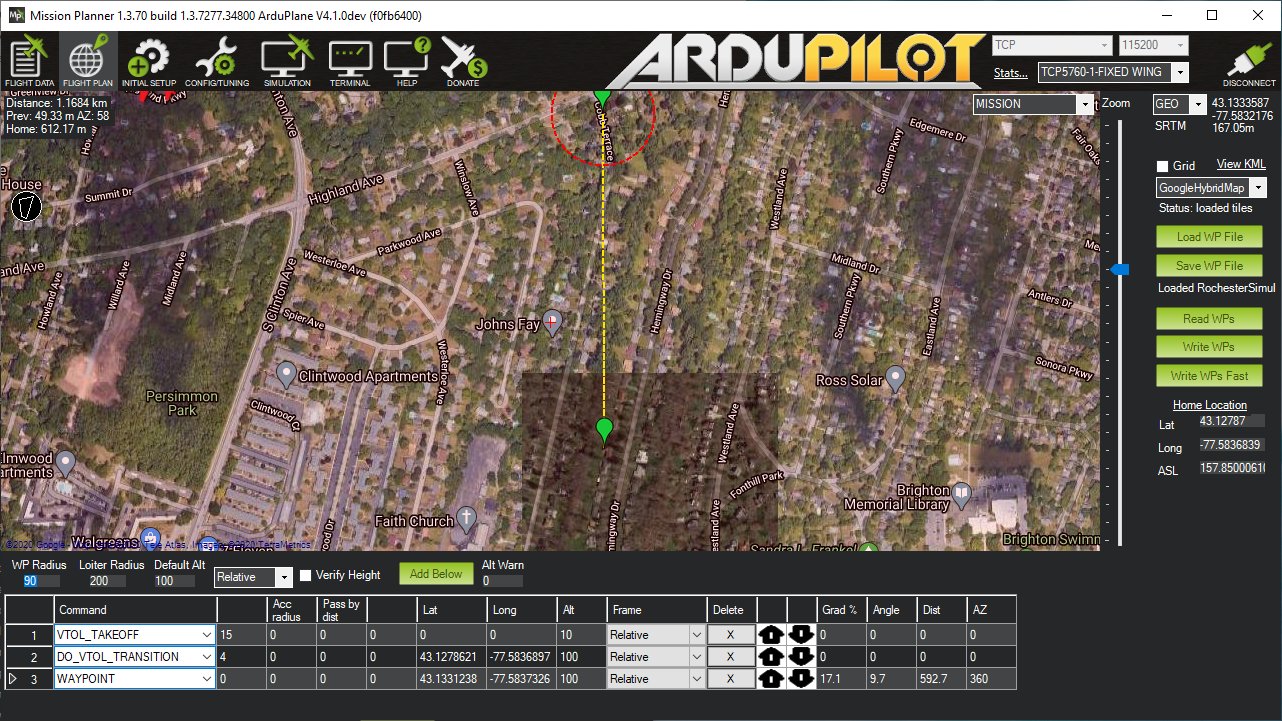
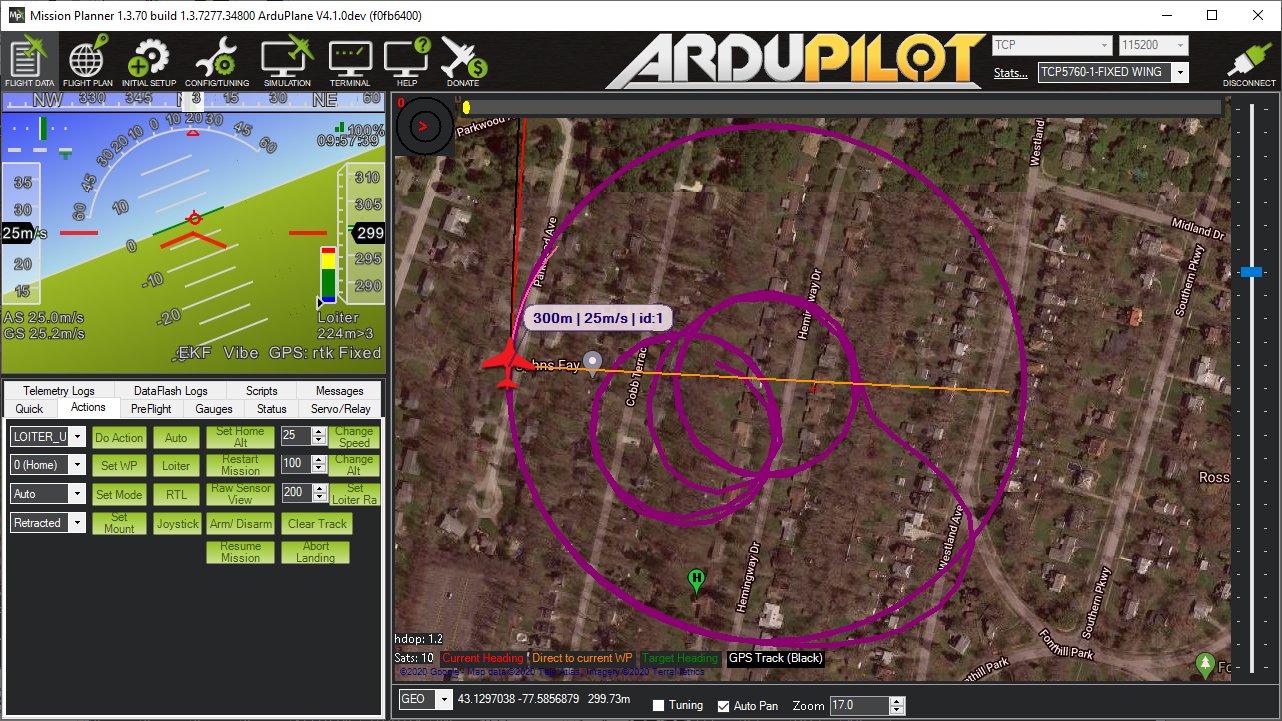
Greg, thank you for advice on putting the QP in loiter mode. One point I am curious, does disconnecting the GPS from the tracker disable
the tracker ? Also does it make any difference to tracking with GPS 3D fix and without 3D fix ? It seems the tracker still moves even I disconnect the GPS from tracker.
Thank you for your help.
Frankie
Param__pitching works.param (8.45 KB)