Hello;
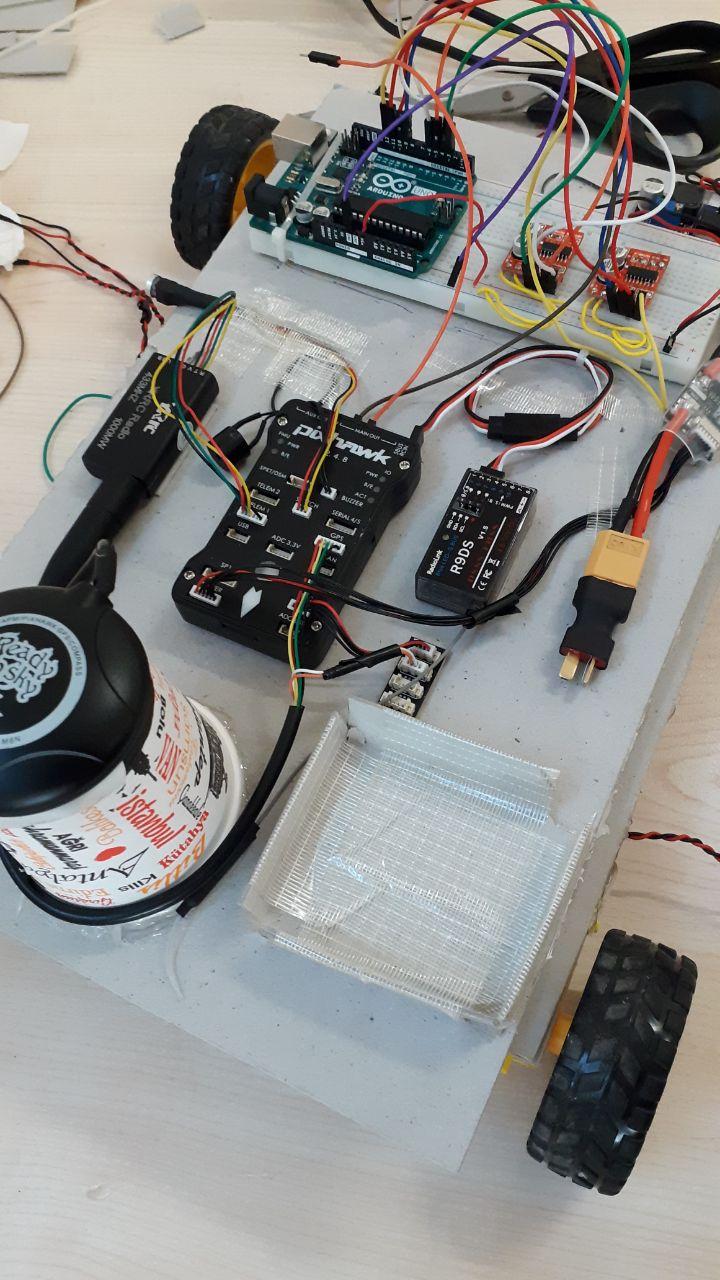
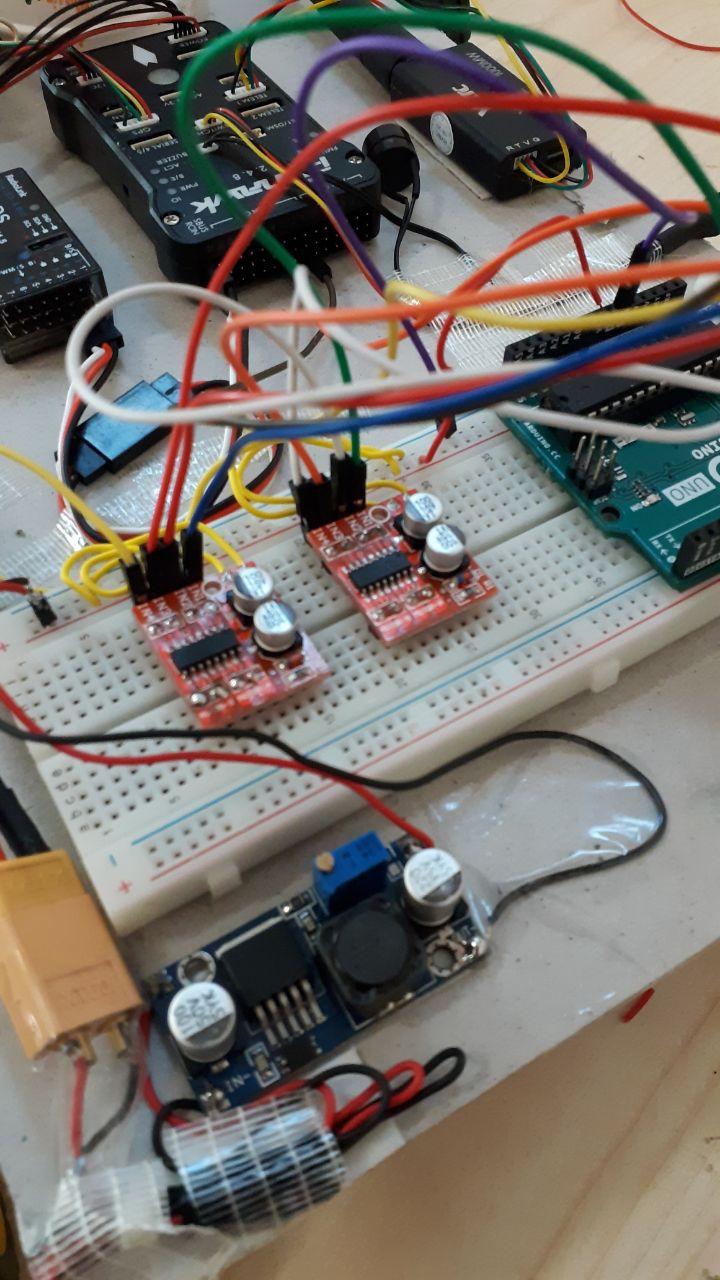
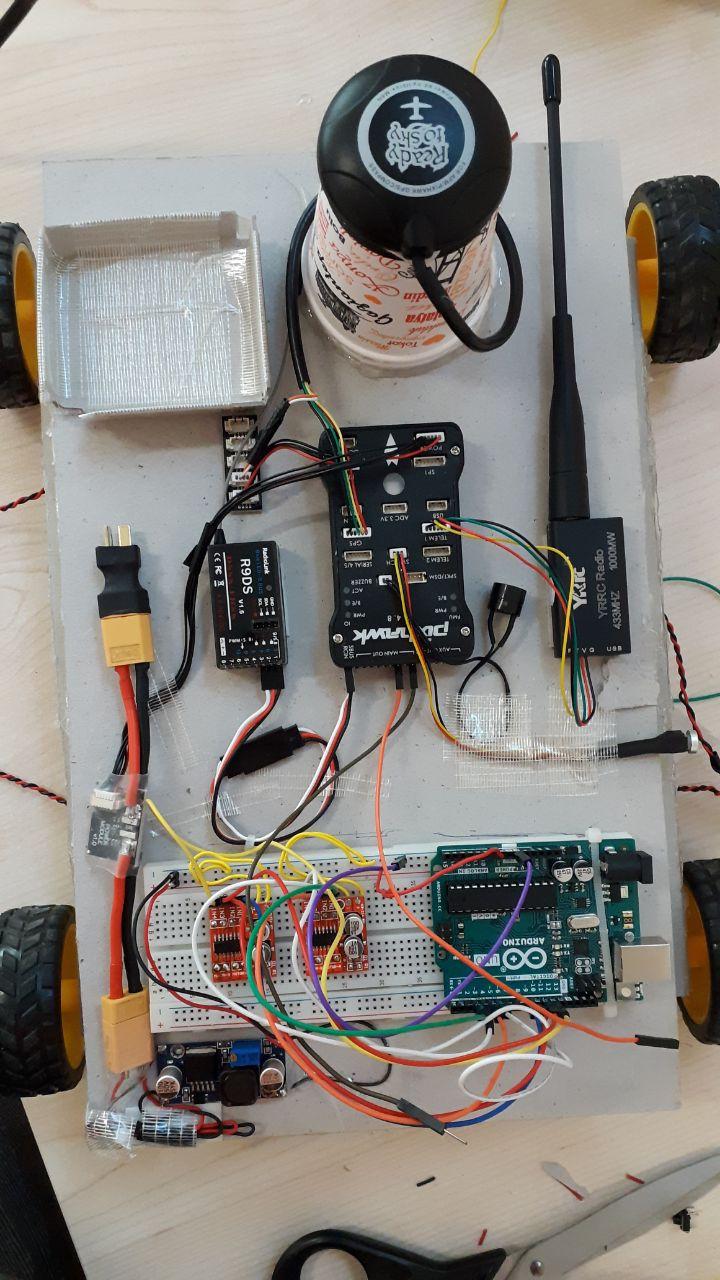
I designed a system for an arduroverm project I was working on. First of all, I take the pwm signal coming from the pixhawk with arduino and drive the MX1508 driver with the analogwrite command.
But I have a few problems, I can easily control the vehicle in manual mode, but I could not achieve the exact performance I wanted in autonomous mode. It’s not going towards the goal in WP missions. You can share your improvements in this regard with me. Thank you.
Surly you started here and worked thru?
Turn Rate
Pivot Turns
Navigation.
https://ardupilot.org/rover/docs/rover-first-drive.html