Currently, the wheelchair I have uses a Shark Bus for communications to its stock controller.
I have found some details on how I can communicate through the Shark Bus with an Arduino nano to the stock controller.
If I get the above communication part working, I am wondering how I can connect Ardupilot to the Arduino which is talking to the stock controller? Is the intermediate Arduino even needed?
Here is a schematic I found of how the Arduino nano would be connected to the existing Shark Bus:
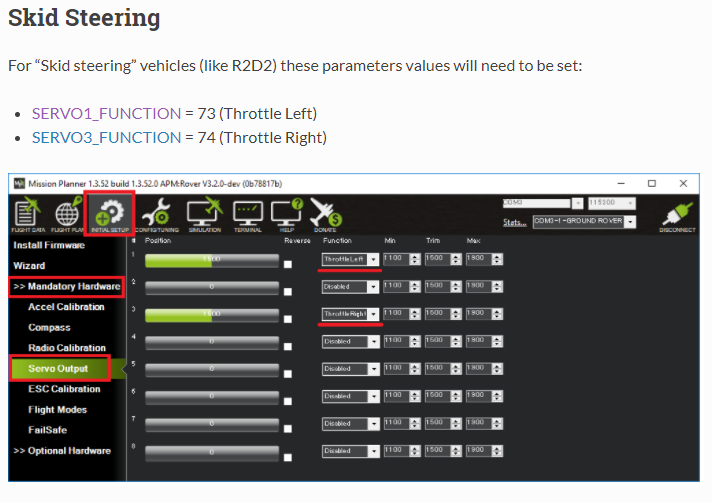
You can easily read the pulse width of the servo outputs from Ardupilot with the PulseIn() function on an Arduino. The range should be from approximately 1000 to 2000 microseconds. So if you set SERVO1_FUNCTION=73 and SERVO3_FUNCTION=74 and connect servo1 and servo3 outputs to your Nano, you can read the left and right throttle values.
ArduPilot is NOT certified for use in applications where ArduPilot is effectively in control of human lives. Members of the development team must not knowingly assist in projects where ArduPilot will be in control of human lives. “In control of human lives” includes but isn’t limited to manned aircraft.
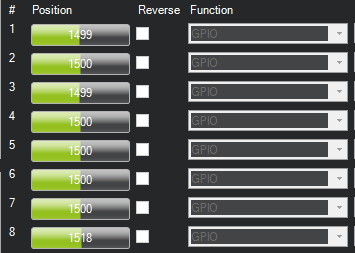
That drop down list should do the same thing, but you can go to the Full Parameter List and search for the parameters and set them to 73 and 74 and then click “Write Parameters”. You should be connected to the flight controller. The drop downs are probably disabled if you are not connected to the flight controller, as well. Throttle Left and Throttle Right are 73 and 74.
I have a few of these controllers and was looking to possibly use them, but for times sake I will just replace with a couple ESC. If anyone still wants to use these there are several people who have done all the work already.