Sorry to hear I failed to choose the right ESC’s… any specific model of Hobbywing (or other) recommended for my setup? What should I look for / what to avoid
Thanks…
Sorry to hear I failed to choose the right ESC’s… any specific model of Hobbywing (or other) recommended for my setup? What should I look for / what to avoid
Thanks…
Though as said, the ESC did work properly with a receiver on a plane, therefore the issue is Pixhawk / MP related… just saying… so before spending more money on another set of ESC’s, might be nice to figure out if/what needs to be tweaked on pix & MP front. Any idea?
Their Xrotor line, there are several choices. I like BLHeli_32 ESC’s for configurability and ESC telemetry.
Just try a standard Transmitter activated ESC calibration procedure. You don’t need Mission Planner for that.
Update on ZIPLINE, theses guys are awesome !!
Hi Dave, here is an interesting one… ok so I am ordering the ESC’s offered but in the meantime I decided to run some initial field tests on the quad, just some short takeoff / landing test. What can possibly go wrong…
So I placed the quad on the ground, set home, set altitude to zero, armed, right-clicked the map and chose Takeoff. The quad took off like a rocket and kept position nicely. While taking my eyes off onto the laptop, right clicking again in order to press Land I started hearing strange beeping sounds from above (from the log I later learned that failsafe was triggered since voltage went down to below 10v, an issue which I have to check later…), so I’m pressing “Land” once, twice, nothing happens. THEN the quad started going out of stable hovering and crashed from ~10m with one of the ESC’s on FIRE!!
Damage - one broken bracket connecting one of the landing gears to the body and the burnt ESC.
What I can’t understand (except of the obvious questions…) is why pressing “Land” did not do anything. Can it be related to the fact that the quad was under FailSafe RTL mode? Should’nt it have landed anyway?
Without looking at the log nor sure. But yes, generally you can override an RTL with another flight mode.
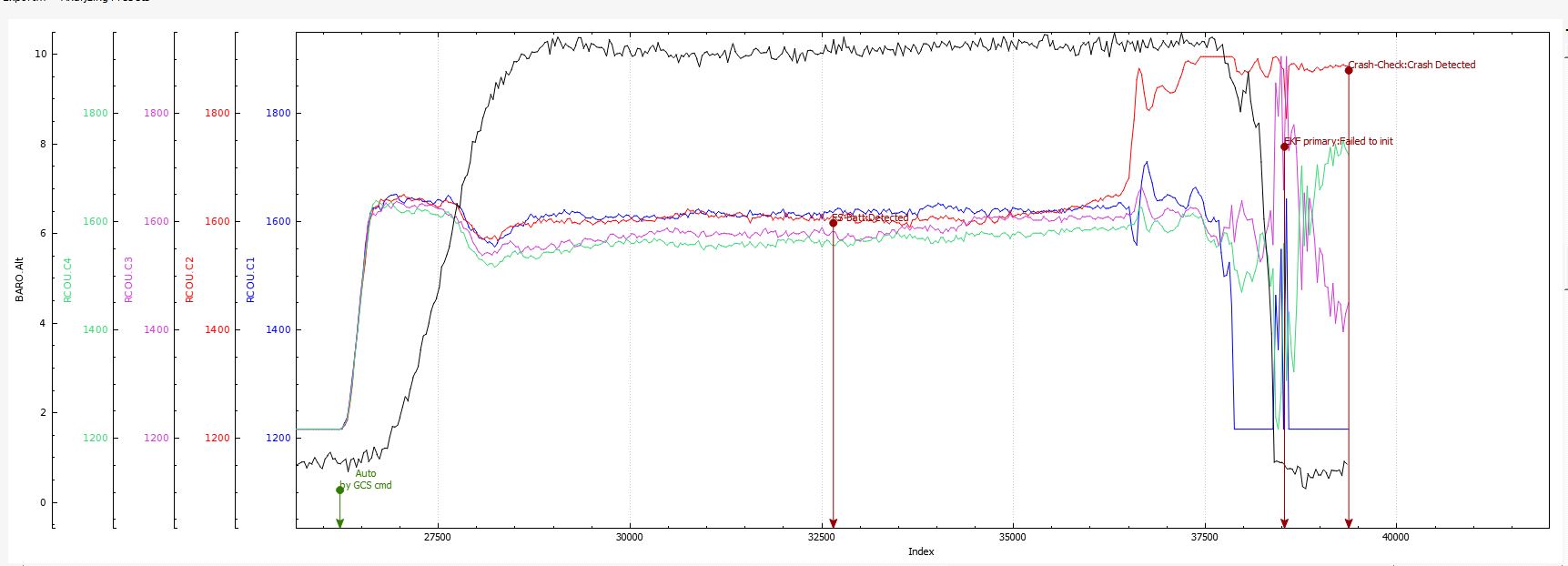
Would you be so kind and review the log file (link below)? The actual “flight” is only a few seconds at the end of the file, it consists of a takeoff, a few sec up in the air, some dramatic motor-servo activity (judging from the graph), and then activation of fail-safe due to voltage drop, losing control and crashing with ESC number 3 burning…
THANKS in advance !
That’s a Tlog. Post the dataflash log from the flight controller. What GCS are you using for control? Has this craft been flown manually to determine general airworthiness and tuning?
Thanks. How do I extract the requested file from pix? (I’m new at that…)
This was the meiden flight (or takeoff-lending test) of the craft. Never flew before. Just uploaded a mission with one line “takeoff” and wanted to leave it up there for a minute and press “lend”.
Used Mission Planner 1.3.66, Arducopter V3.6.6.
How to download logs:
http://ardupilot.org/copter/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html
So the craft has no RC control just commands from the GCS?
Do you mean this one?
https://drive.google.com/file/d/1n9cR54nZaYXKBazWoeSzyRnkoVDzElsK/view?usp=sharing
That’s a bad idea to both do a maiden flight w/o RC control and to start with an Auto mission however short. But that has been suggested here by everyone I think. Install an RC system and start over would be my suggestion.
Yes, that’s the right log. Shortly after the low battery FS the ESC for motor #2 failed. The evidence can suggest either a motor, ESC or prop failure but seeing as how your cheap ESC was in flames I guess it’s obvious where the problem was. I see no evidence of it switching flight modes. If you had been using RC control this can easily be seen by looking at RCIN 5 the flight mode channel.
Thanks Dave, I understand the need of an RC, I know this is the right way but as the APP I focus on must be communication free, this is not an option. Maybe for initial tests only. I’ll do that. As for the findings, kind of strange that you see #2 had failed in light of the fact that the ESC that caught fire was #3… are you sure there was a problem with #2 ?
Finally, with 3508 motors, 30A ESC’s, 12" props, 3S battery, the data sheet (motor) shows a current of 13A. I guess if the 30A ESC burned, it must be the cause, though I would love to rule out any motor / pix problem just to be on the safe side. Any idea of how to single out the problem?
Finally, if the pix servo output max for the motors was set at 1800, how is it that I see in the graph (in the tlog) a value of 1900 on motor 2?
Hobbywing XRotor Micro 30A BLheli - 32 Brushless ESC - Black 4PCS are approx 76$ (on gearbest), sounds costly…
It doesn’t really matter whether its an option or not you will need RC Control to properly configure, calibrate and tune the craft.
If thrust is lost from a motor (Motor, ESC, Prop) the FC will drive that output to the max attempting to stabilize the craft. In your case this was motor 2 (RCOUT2 from bin log). To compensate for loss of thrust on one motor the motor in the opposing arm (Motor 1) will be driven low, again trying to stabilize the craft. This is clearly seen in your log.
T-logs don’t tell you much.
I would just replace all those ESC’s. I wouldn’t consider $19/ESC expensive for those Hobbywings but up to you. Other brands that have performed well for me are Speedix and Aikon.
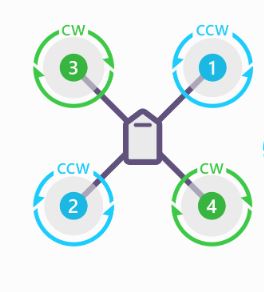
Just to be sure this is the motor order reference for the log:
Ok, will go for the Hobbywing BLHeli_32 as recommended.
Will attach an RC.
As for the motor setup, according to the scheme. Again - number 3 was the one with the ESC that had burned.
On the graph it seems to me that the first thing that happened was a bit after 37500, where motor number 1 dropped RPM and there was a first altitude drop, might be that the opposite number 2 compensated by increasing RPM, not the other way round. The occurrence on axis 1-2 does not explain the burning of number 3 though (unless number 3 increased power in order to keep the drone in the air, going according to the graph, above the 1800 limit and burned)
It’s not graphing RPM, it’s PWM output. The 1st thing that happened was RCOUT2 went high, indicating loss of thrust, shortly followed by RCOUT1 going low, attempting to stabilize the craft just as I described above.
It’s classic quadcopter response to loss of thrust on a motor.
Hi, just an update… Ordered the ESC’s from GearBest on March 25th, paid, Up until now they have not even shipped it!! daylight robbery. The keep saying they will soon ship it. I’m stuck for almost two month, payed and got nothing. Never buying from them again!