Hello,
Is it possible to modify droidplanner to use a smartphone wifi to communicate with pixhawk directly without the use of a telemetry module, given that we are ensuring the data reception at the drone’s end using any companion computer?
In my opinion no, you always must establish a connection, without telemetry or wifi module you cannot do nothing
If you want to limit your control range to 90 meters I’m sure you could cobble something together…
My question is always, “Why do you want to use WiFi in the first place?”
these work great
They don’t have the range, maybe 50m or so, to be supper useful in flight, but for changing parameters on the ground its very convenient
ESP8266 radios work well also. I have a couple of them working on PixRacers and one on a Kakutte F7. Sure, short range (~150m) but for general setup, configuration,calibration and log download purposes they work well and are dirt cheap. <$5 for the 3.3V powered ones.
Thanks @dkemxr @Dave84 @oldgazer1 @iampete
But I want to use the wifi of my smartphone to connect to pixhawk, I should just need a compatible wifi receiver on the pixhawk side.
Also can you advice on how to use 4g lte of phone to connect to pixhawk?
If you want use 4g lte on your pixhawk you must use a raspberry board with raspberry pi
ESP8266 radio works fine for WiFi. Short range though.
4G isn’t of much interest to me but there are options around. Here is one. You will need a RPi as mentioned, a modem and a data plan. https://uavmatrix.com/product/uavcast-pro/
Based on many posts inquiring about Cell telemetry/RC control and how few actually do it the hassle factor and expense must turn them off.
Pie in the sky. Put the cell phone down and use a laptop running a Ground Control application like Mission Planner, APM Planner 2, or qGroundControl an use telemetry radios.
yes, I am working with Rpi on this, but need some help. my work so far:
- have set up TxRx between pixhawk and Rpi
- Have setup 4g link between pi and cloud
- Not sure how to uplink phone’s position(gps) to cloud(using phone’s 4g) which can be accessed by Rpi on the drone
any info will be helpful…tks.
I think your endeavour is ill advised and inherently unsafe. WiFi is not the do all and end all technology the unlearned think it is, and the vast majority of WiFi enabled aircraft are little more than over priced toys.
Range is always going to be an issue Range extenders and repeaters add additional points of failure, and we haven’t even touched on latency
The real bottom line is there are numerous other mature and robust technologies available that are much better fit than WiFi.
Au contraire 
Yes, you are seeing right - that’s 21 kilometers range!
Ezwifibroadcast supports very long range and control using stock wifi dongles. I don’t think I would trust it myself, but it shows the art of the possible.
If you don’t want to have tellemetry modules connected on your phone and use your phone WiFi you can just
Buy this
Connect it to your tellemetry ground unit and power your tellemetry ground unit with a power bank
This way you will take tellemetry through WiFi
Don’t forget. Tx to rx. Rx to tx
@ andyp1per wow, can u give more details on the setup…more of a step by step guide…
I would like to do this so I can ssh into the companion raspberry pi from my laptop. Without a router, how to connect? Or possible with a travel router?
Hello, I tried to use the ESP8266WIFI module on kakuteF4 to establish communication between the ground station and the flight controller. At present, my PC can connect to the WIFI signal of the ESP8266, but the ground station (missionplaner QGC) cannot communicate with the flight controller through UDP. Have you encountered such a situation, thank you.
No issues really. I use those radios on several craft. Connect the laptop to the WiFi radio and Mission Planner and QGC auto connect.
could you please tell me your firmware and configuration of the board?
I use Kakute F4 board with ardurover stable4.0.0 firmware and ardufruit ESP8266 board with firmware V1.2.2.
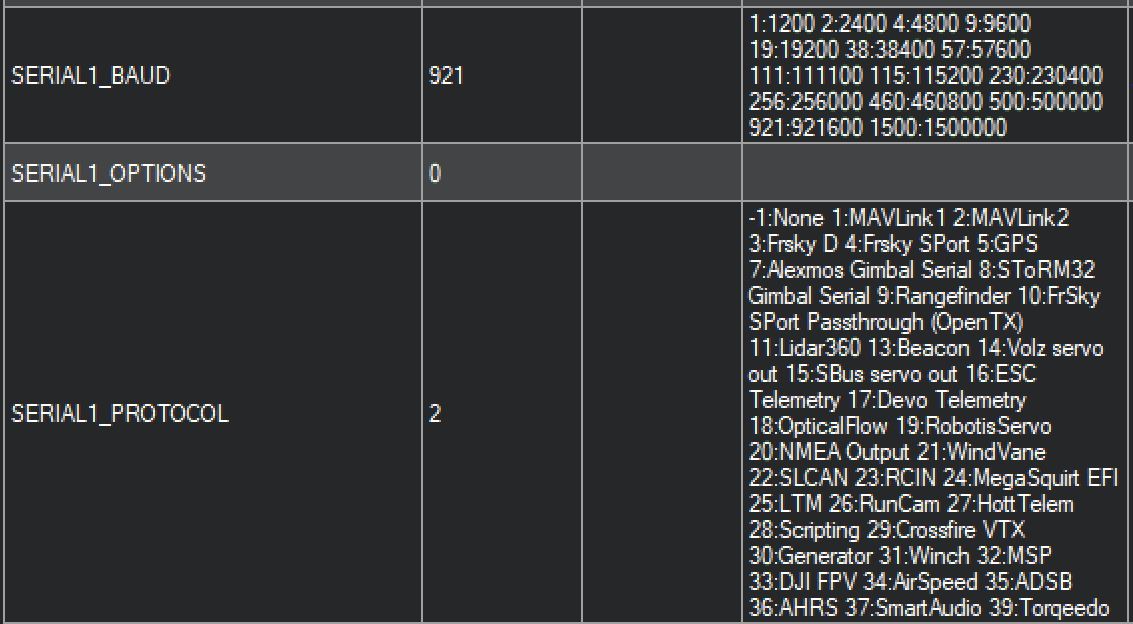
I connect serial 1(telemetry 1) with ESP8266 board. I set the baud rate 921000 and use MAVlink 2.
When I tried to use WIFI to connect to the mission planner, an error message appeared: Only one usage of each socket address (protocol/network address/port) is normally permitted. When I try to connect to QGC, an error message will appear: error binding UDP port, the address is protected.
I cannot figure out why. sorry for my poor English.