I have matek H743 running ardupilot and esp32-S v1.1 101010 running drone bridge wifi board.
No problem connecting via wifi but cant connect with mission planner.
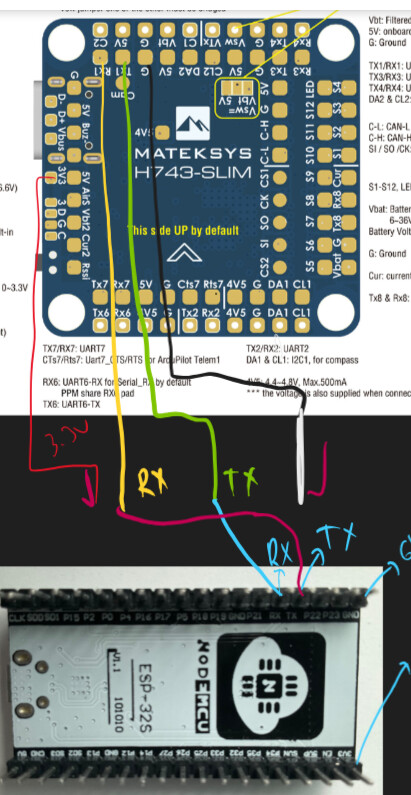
Did you checked the max. current of the 3,3V from the Matek board? The specification for the H743-Slim says that the 3,3V supply can only deliver 200mA. The ESP-Modules need up to 430mA when sending data.
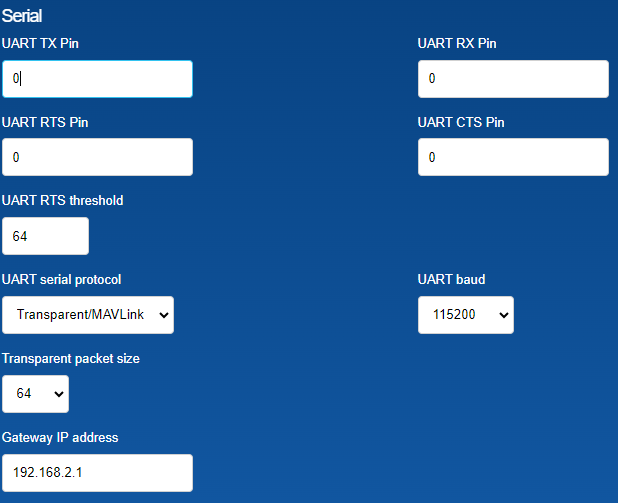
you need to set the tx/rx pins to the ones you have hooked to the esp32 from that webpage picture you showed above. also make sure baudrate matches fc baudrate. SERIALx _PROTOCOL should be set to mavlink2. there is a discord for DroneBridge
In idle conditions, when the ESP module has nothing to do, it will drag about 80mA. The LED will light up and and everything seems to be ok. I assume that you want to send data packets permanently. Then there is a risk of data loss due to voltage breakdown and damaging the 3,3V port on your Matek board by overload.
For my Matek F405-WMN, I used the 3S battery voltage with a separate 3,3V/2A DC/DC converter for supply of the ESP modules.
@406FPV thank you for your answer I will try it. @GER50 thank you, I am trying to control the drone over pymavlink and I need connection. So I will look for different source of voltage