Ok thanks for the confirmation. So I am going to modify my change to put the baro change on the old config and then keep the v2 for whatever board that is for
1 Like
Hi Andy I current just bought the board and flash apm , seem the baro is not working , imu are not working . it is the F745 AIO v2 , should I use some special firmware you guys are discussing about ?
Update the F745 v2 firmware works , now will do calibration and setup for test flight will report any more issuse
Thank you very much
Also is it possible to have external log for flight log since this fc only have 8mb which is not enough .
thank you for your answer ![]()
You need to use 4.4 since my change currently hasn’t been backported to 4.3
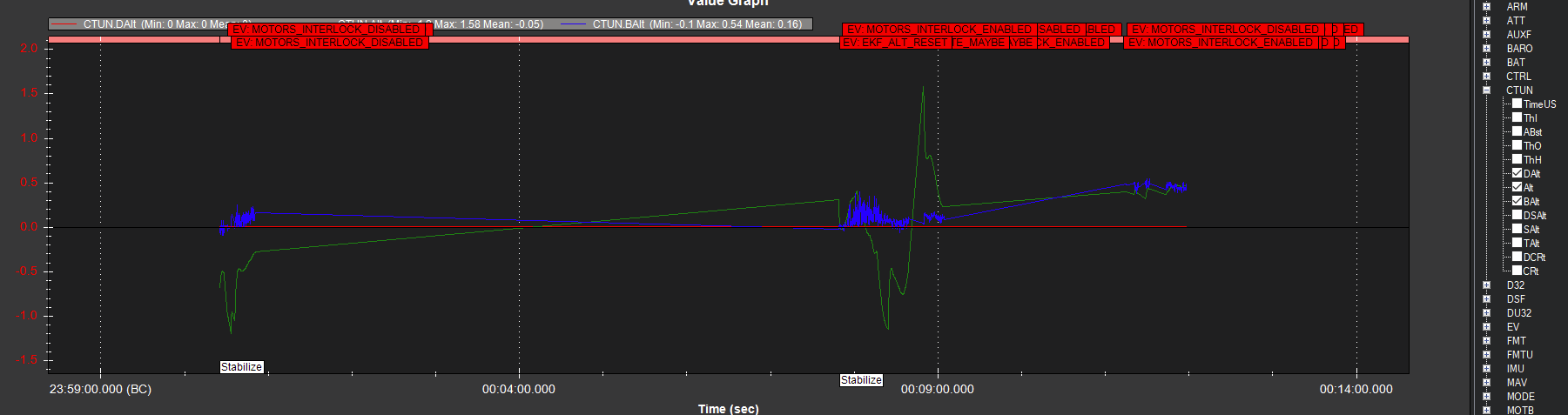
thanks did a couple of test flight it works well in stabilize mode, however in altmode it turn crazy even I cover the baro . after 3 test flight with altmode i have crashed and burn the enitre AIO usb break and short circult ![]() . I have previous flight log which I can send to you . my goal is to have altmode working
. I have previous flight log which I can send to you . my goal is to have altmode working
Sure, send the log. Sorry for your crash.
Need an actual log - i.e. .bin file
Nothing useful in those two logs
I See thats all i have got since i burn up the fc which i’m not able to get from the last crash , not sure why altmode got crazy and shoot up maybe to new barosensor or vibration. wondering if i need to do some special setting , just don’t want a second time if i try other fpv type flight controller but anyway thanks for your help so far .
Alt mode misbehaving is likely to be vibration. These smaller copters are very affected by vibration - you need to get your filtering good before attempting EKF assisted modes.
1 Like
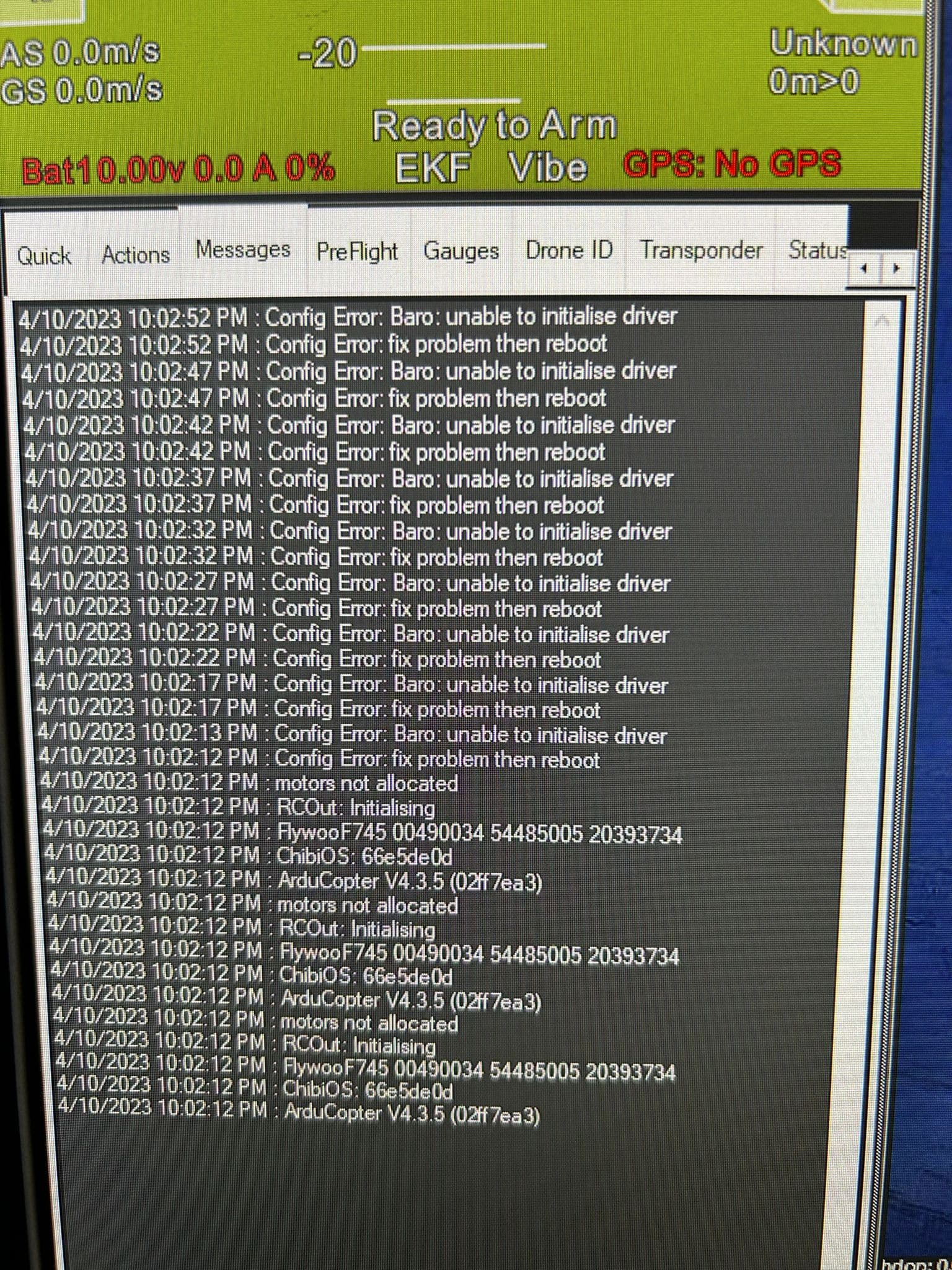
I was having a similar problem with the baro error.
Seems that it has not been updated in ArduCopter 4.3.6
Thank you Andy!
I’m trying to add optical flow to this board. I started with the original firmware you fixed the barometer and motor mapping in, but it did not work when following these directions Matek 3901-L0X Setup Help - No Data and Bad OptFlow Health Message
I updated the board to 4.3.7, but now the board is showing no barometer again.
Did you try 4.4? I think it might be only fixed in that.
No, but I will. Thanks.
Is there a minimum memory requirement for optical flow?
Ok, 4.4 beta 5 works. I didn’t catch that the “most current” is so far behind.
I did find a note that more than 1M is required for non-
GPS navigation.
Which features are much less common that could be removed in a custom build so that I can have non-GPS with 1M?
You might even find it just works on copter if you enable it - its usually plane that overflows
I tried it. I’m not getting the basic indications called out in the man page, but the required settings seem to not be documented in a single place so I’mnot confident in the configuration.
To that end, when I look at the hwdef for this board, I see: SERIAL_ORDER OTG1 USART1 USART2 USART3 UART4 UART5 USART6 UART7
Am I correct that means Serial1 is UART1 etc?
Is there any way to capture traffic on a serial interace to see if the optical flow board is sending updates? Can I use the REQUEST_MESSAGE command? Is the optical flow data not sent by default? It’s listed under “SRx_EXTRA3”?