Hello all,
I’m relatively new to all this so apologies if this has been asked many times before.
I ran the Compass/Motor Calibration and got the following results.
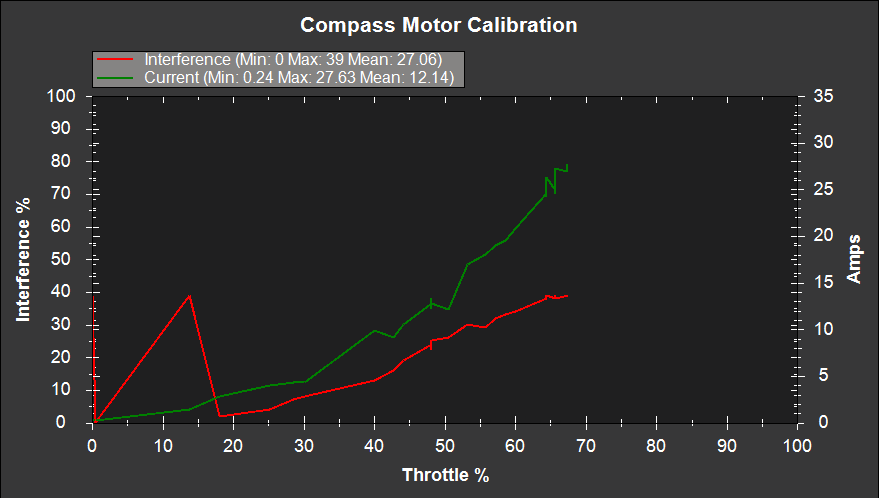
I see where the Ardu docs state under 30% is acceptable, that said 27% is pretty close to that cutoff.
What do you think, should I try to mitigate the field or be okay with my current results?
Cheers,
Pete