Hi the compass performance is pretty good flying, can’t fault it in the air except for what you can see in the plots below. Compass is custom RM3100
When below 6m of flying height compass sees small variations and regular yaw resets and up to 45 degrees if placed on a desk which is much more sensitive from what I have seen before.
It is a good distance from other components except the gps aerial. The GPS SMA fitting is brass with nickel coating and lead free solder used.
On the ground I occasionally see error messages like this: Check mag field: 48, max 875, min 135
Do I need to make a larger (10mm) gap between the aerial sma fitting and the compass sensors? A lot of work to test the thesis…
If you have good current sensing then Magfit will give a current offset that might clean that up. It’s an easy test to see if there’s an improvement before you go and re-wire the drone to move the compass.
I’ve done motor calibration using the bench test. I will do a magfit calibration before my next flight.
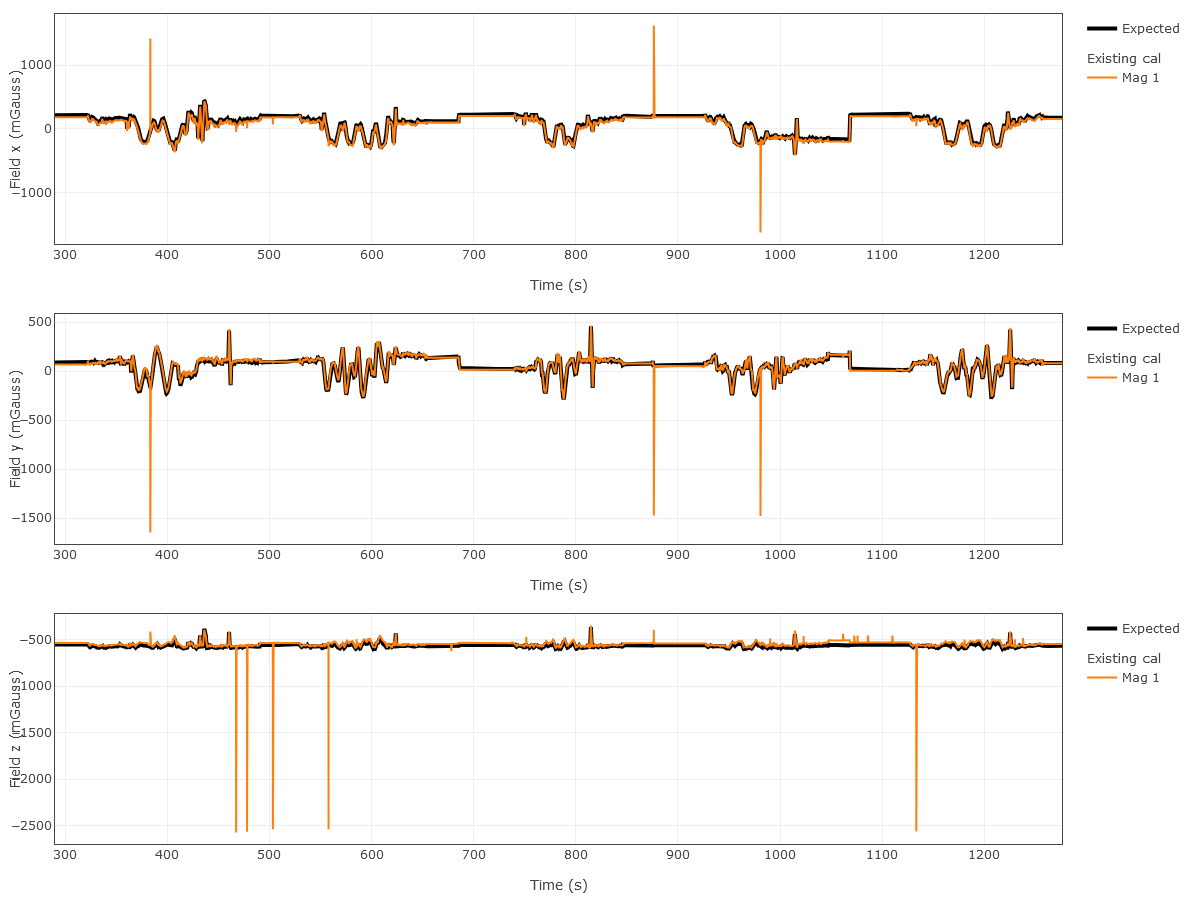
Are those spikes normal?
Motor interference is not significant.