Hi,
Got a custom built Y6 Copter running 4.2.0 from a small local company.
(But I have realised I probobly is best of by solve config issues myself. Had a Misconfigured GPS at first… that i think i now have solved. (Had lots of GPS gliches))
We have realised we have some issues with the compass’es.
Holybro Pixhawk4, with M8N GPS/Compass combo.
Primary Compass is the M8N unit mounted on a 20cm tower. Internal magnetometer sometimes has lots of interference, so normaly disabeled.
We get all kind of compass error messages via mission planner and message logs.
Tried looking through the logs by MavExplorer and the only thing I am clear about is that the innovations are way of for the compass.
You should update to latest Stable disable EK2 and make sure EK3 is enabled.
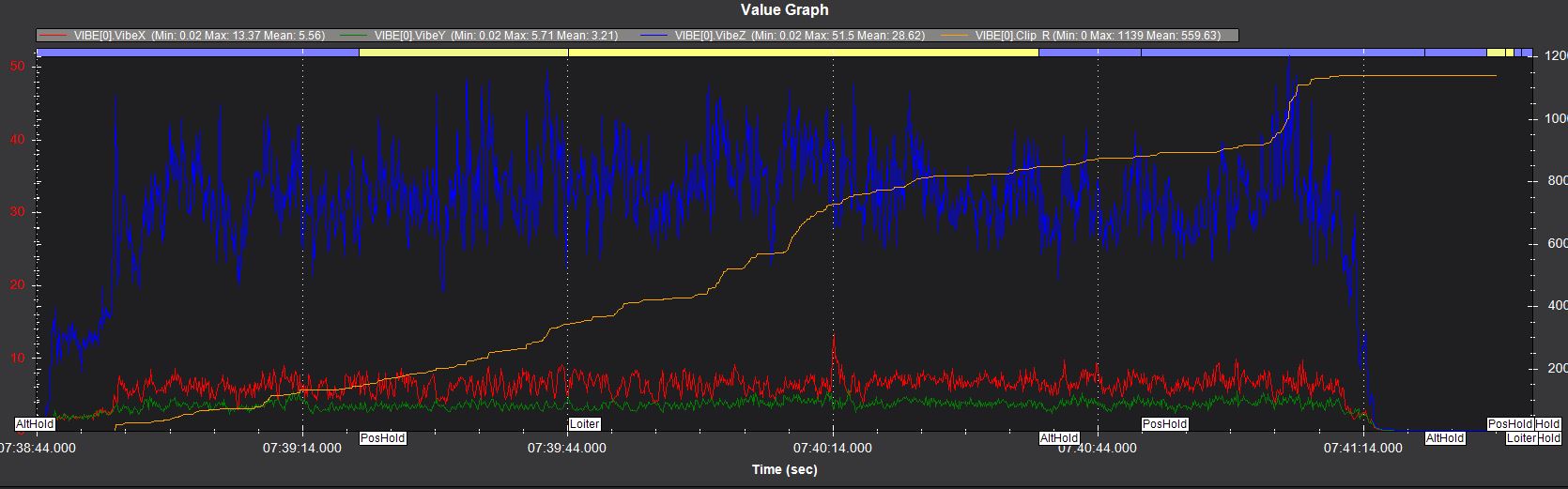
Then deal with the very high vibrations on this craft it’s a non-starter with >1000 clipping events in this short flight.
Thanks,
Yes its a big 28Ah li-ion pack.
Have not dared to change fw until,i got a clue about the basic problem.
For my understanding…
How did you see those clipping events?
What are more normal vibration values?
The FC is placed on some sort of flexible material… so i guess that i shall test to remove that…
And the likely cause of your problem. If you use the same pack every time, locate in the same position and use Magfit to calibrate the compass and produce the Compass Motor coefficients it might be good enough.
The Z-vibes should be down where X&Y are but under 20. The Wiki says under 30, which is too high. And after working on reducing these (balance props, better FC isolation) you need to configure the Dynamic Notch filter.
I don’t think this is logical. Starting with the most up to date firmware will save you time later. Some of the PID’s looks suspect, where did they come from?
How do you mean Li-Ion is a problem? (big metallic pice ? )
Versus Li-Po?
Regarding FW update… i guess that it is a philosophy question… my experience is that ‘don’t change to many parameters before the basic problem is understood’. But i guess that if you suspect the sw then the latest version is a valid action. anyway… i will do as you suggested.
The PID’s are from the supplier, but I think their experience with ArduPilot is quite limited… Know for a fact they preferred to use old DJI controllers… I guess that I should start over with all settings soon.
Oh yea, much worse than Lipo’s in this regard. You will find many posts here about that and it’s my own personal experience. Usually it manifests itself on smaller craft where physical isolation is difficult or impossible.
I would believe that because some of the settings don’t make much sense. You may be better off to start from scratch.
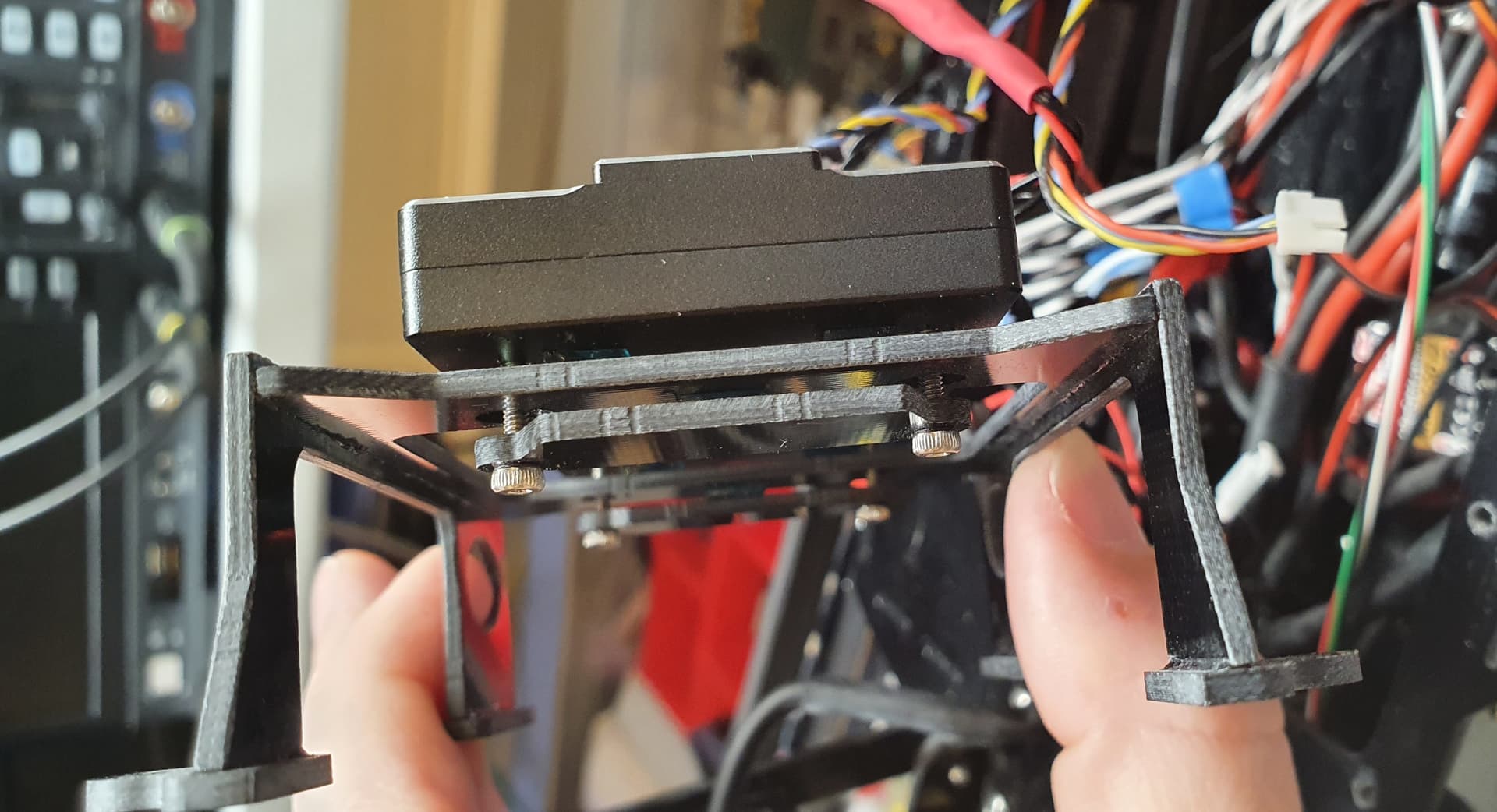
Ok, so the vibration issue’s are sorted out… Cables under the antivibration bridge touched the bridge, coupling cable vibrations directly to controller. From 50 mean, and 70 peak vibrations (m/s/s) down to 10/20 with cables rerouted… (The antivibration bridge was actually a nice piece of engineering.)
(Screws passes through large openings in middle bridge, and is mounted in FC and the lower plate, and foamy stuff is placed between bridge and plate, and also between FC and bridge. But the cables were in contact with the lower plate causing the excessive vibrations. Anyway… easily sorted out…
But the compass issue seams like a worse nut to crack. Graphed battery current versus magnetometer values… and the current has a linear impact on the magnitude of the magnetometer values… The strange thing is that the internal and external magnetometers seams to be like vise affected… Had thought that the external should have coped better… But I guess that the current flow through the individual battery cells might cause magnetic fields close to the external compass/magnetometer located in the GPS module. (The FC is mounted below the back end of the battery pack)
Have ordered an external magnetometer module for further experiments… Wondering if magnetometer placement on the end of one of the landing legs might help up my situation.
Will also try with some 10Ah Li-Po’s to see the difference to the 28Ah Li-Ion packs.
GPS for Yaw requires requires two GPS units mounted as far apart as you can get them, and it’s not a complete replacement for the compass.
Just see if you can do a flight in Loiter mode with lots of yaw and some circle or Figure 8 patterns, then post a link to that log.
We will step through the magfit process, and look for other issues.
Some feedback…
I’m not done, but major progress was made.
Vibrations were taken care of as of above
updated to 4.3.3 and enabled EKS3
The Compass Motor coefficients were totally wrong, disabling this and relying on the external compass solved this totally… no interference noted (at least initially)
Now i’m down to doing a real tuning of the vehicle.
And i’l upload some new logs…
But time and wether has not conicided yet.
So basically… misconfigured system…
I had some high velocity innovations when climbing and dropping altitude. And overshoot of desired altitude. but i’l get back to that… I have a suspicion that the electronics compartment might be to ‘airtight’ for the barometer. But further tests will show…
Memory is weak, but from the above answers it seams like i just disabled/reset the compass_mot params and got a functional setup. (Erroneous compass_mot values threw both compasses off in response to logged motor current, where in reality there ware minimal current / compass interference]
The original configuration delivered by the manufacturer had quite a lot of misstakes.
I suspect that the configuration that was used came from another of the manufacturer platforms, configured by a third party expert, and just cloned to this platform in an uneducated decission…
So i started all over and did a new total setup/tune.
It works ok now,
I have some issues remaining, but not critical
It seams my three battery packs makes the hole system behaive differently regarding vibration. Sometime the vibration values are all ok, sometimes they are a little bit higher (higher, but not critical) cant find anything that differs mechanically between the packs (packs built up by 18650 cells in special trays that fit snuggly to the body of the airframe). Im not 100% sure yet that the vibration variance follows battery packs, but it have been a theory for a while now.
have had some issues with a somewhat wild control responce first 30 sek of flights in cold weather, below freezing, (0c). I have a suspicion that it might be an effect of the pixhawk4 not having heated IMUs as the cubes comes with…(there must be a reason for its use in the cube platform, is my reasoning about it)
Been thinking of trying to reduce vibrations by incorporating notch filters, but our esc’s dont support telemetry so im not able to use the dynamic notch filtering feature… but looking for esc replacements with telemetry (currently using hobbywing xrotor pro 40a 6s) but have not foud anything suitable this far. Annonced hexoons esc’s might be suitable, but are physically to big for the current engine gondolas that houses the two esc’s on each boom
Another thought is that the propwash causes vibrations when passing over the round engine booms. And that 3d printed spoilers on the underside of the booms might help reducing theese vibrations. Have not gotten to test this yet…
Minor correction here - moving baseline can indeed be a complete replacement for magnetometer based compasses. GSF does a great job filling in the data gaps. However, if your application requires extreme attitudes or very rapid heading changes (frequent FPV “freestyle” type maneuvers), it may be advisable to have a compass fallback.
Actually been testing this on my small ardupilot Rover electric mover platform with some initial pleasing results.
(My external ist-8 compass on a cube purple has showed itself quite troublesome, with quite often constantly rotating yaw values until i just decided to remove it and only rely on my gps for yaw setup.)
Hi Yuri
Having that compass fallback was probably what I was thinking about when I (mistakenly) said GPS for Yaw is not a complete replacement for a compass.
If I was using GPS for Yaw I’d probably still have a compass all calibrated provided magnetic fields permit.
Seems nice, but I have question, If i use Gps for Yaw. ek3_mag_cal in what number should be? I have one with compass, without weight, perfect getting weight compass inovations goes crazy, Did all magfits and etc. So will gps for yaw will be solution ? and GSF how it works?