Hi, I’d like to ask a question about compass calibration. Why the DJI products just need to rotate two circles to complete this calibration while us ardupilot need six circles or axes?
I read carefully in this calibration process which is based on the L-M algorithm, with which I am so familiar. I think we might have some too strict limitations in the sampling process.
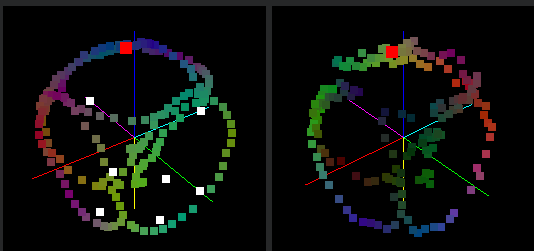
300 points are needed and then shuffle the samples, then remove the bad points.
If there indeed exists bad points, the ellipsoidal sample would lost some particular points in their own position on the ellipsoid.
And then the sampling process needs us to rotate a lot time to hit the the exact near-by position where those removed points lay before according to the reject-aera accept method.
In this process we just like somehow blind, cause we don’t even know the approximate position of those removed points. So you would see someone calibrates his/her compass toooo long time before their first fly trying, which is indeed so unhappy and frustrating and sometimes even embarrassed or stupid.
Is there any good ideas to improve this calibration sampling method? Why DJI is so confident to just take such less compass data samples to finish the calibration?
Thanks,
ana
 Um?
Um?