Hi all,
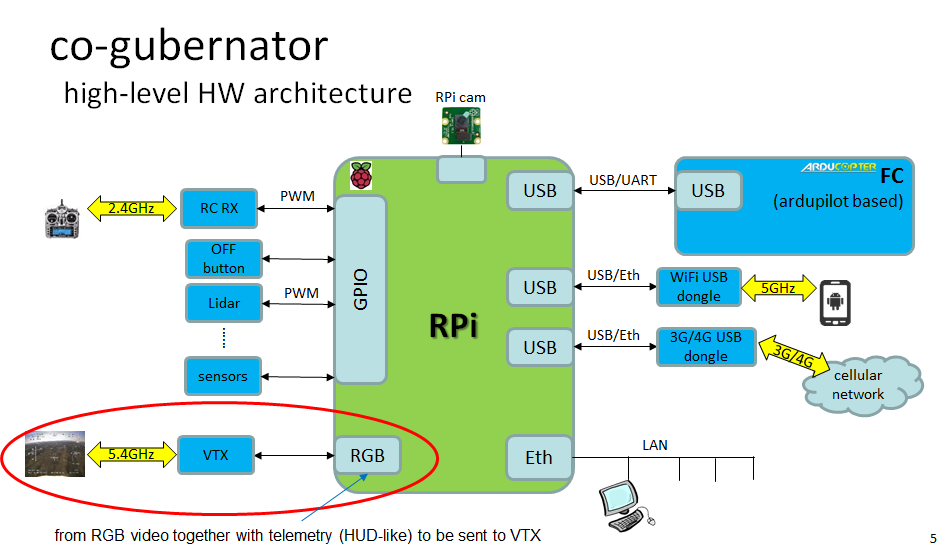
I’m developing a frame-work for companion with RPi platform and one of the functions I’d like to implement is to use RPi as FPV cam connected to analog VTX via AV output (as in the figure below)
Basically the firmware assumes that if connected via USB you are setting up, not configured for flying, so a few things get skipped. USB is entirely possible but I’d always recommend serial if you have one available.
I’m using VRBrain 5.2 and serial ports are both already in use (one for telemetry to GCS and one for telemetry to taranis) so I prefer to use USB. btw I will check and in case decide to quit taranis telemetry
Are you attempting something like this: https://youtu.be/X_s6ko0hwqE ?
I coded this OSD in python. It runs on a Raspberry Pi and has most of the components you have in your schema - except the VTX. I transmit the video over mobile internet (LTE). The video is also stored on the Pi
I’m searching for an OSD Solution on the Raspberry reading mavlink from Arducopter. I planned it with minimosd but to save an serial would be great.
It seems SOFTOSD is dead but i don’t find a real alternative…
What about your python code? Will you publish it? Any other alternatives for rpi osd???
i saw it and tested the “old” wifibroadcast osd. But the usage is absolutely unclear. Got i to display osd but how to combine with rpicam out? Don’t want the rest of the wifibroadcast or openhd… only ned a osd on rpi for saving serial.