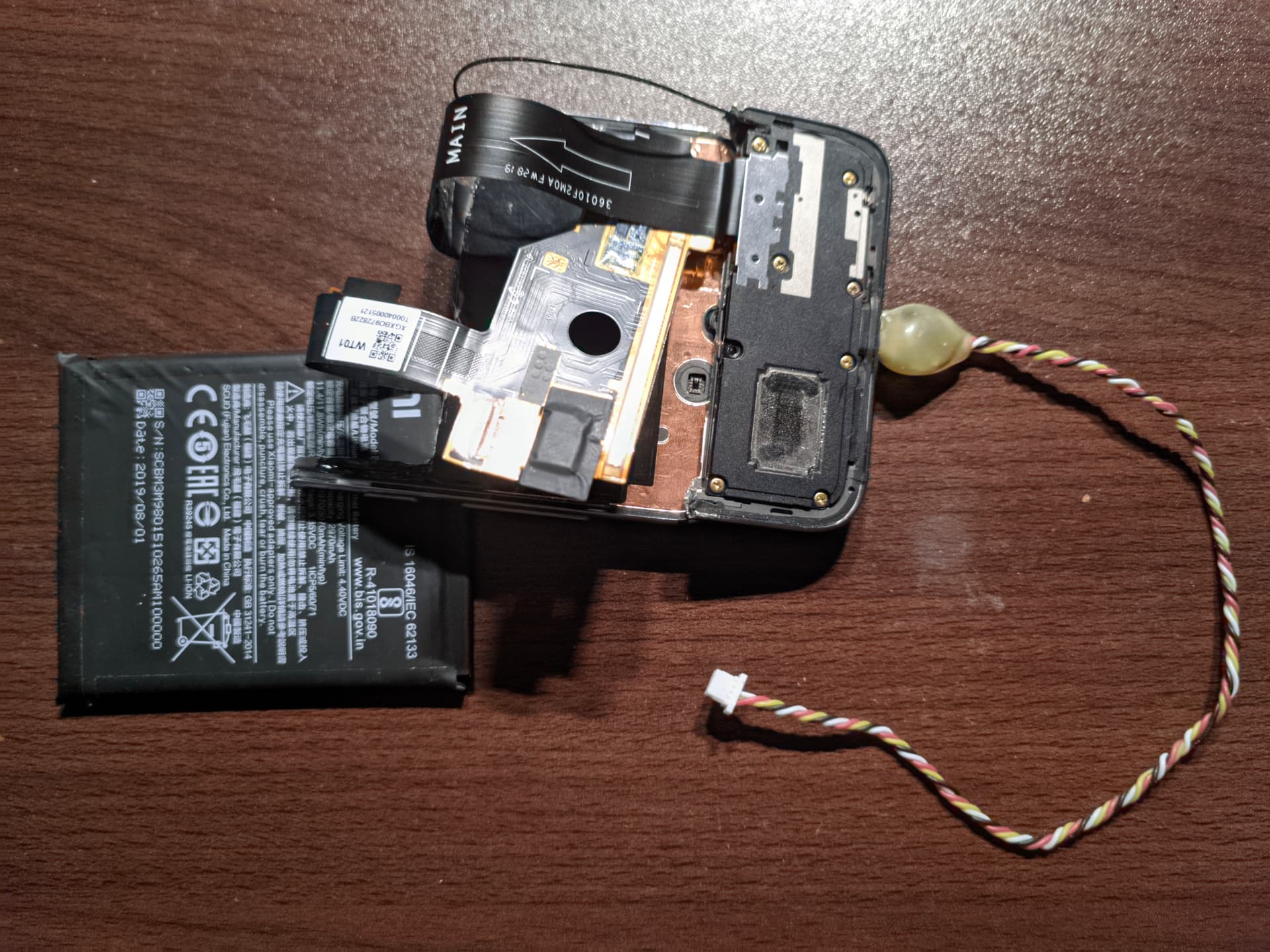
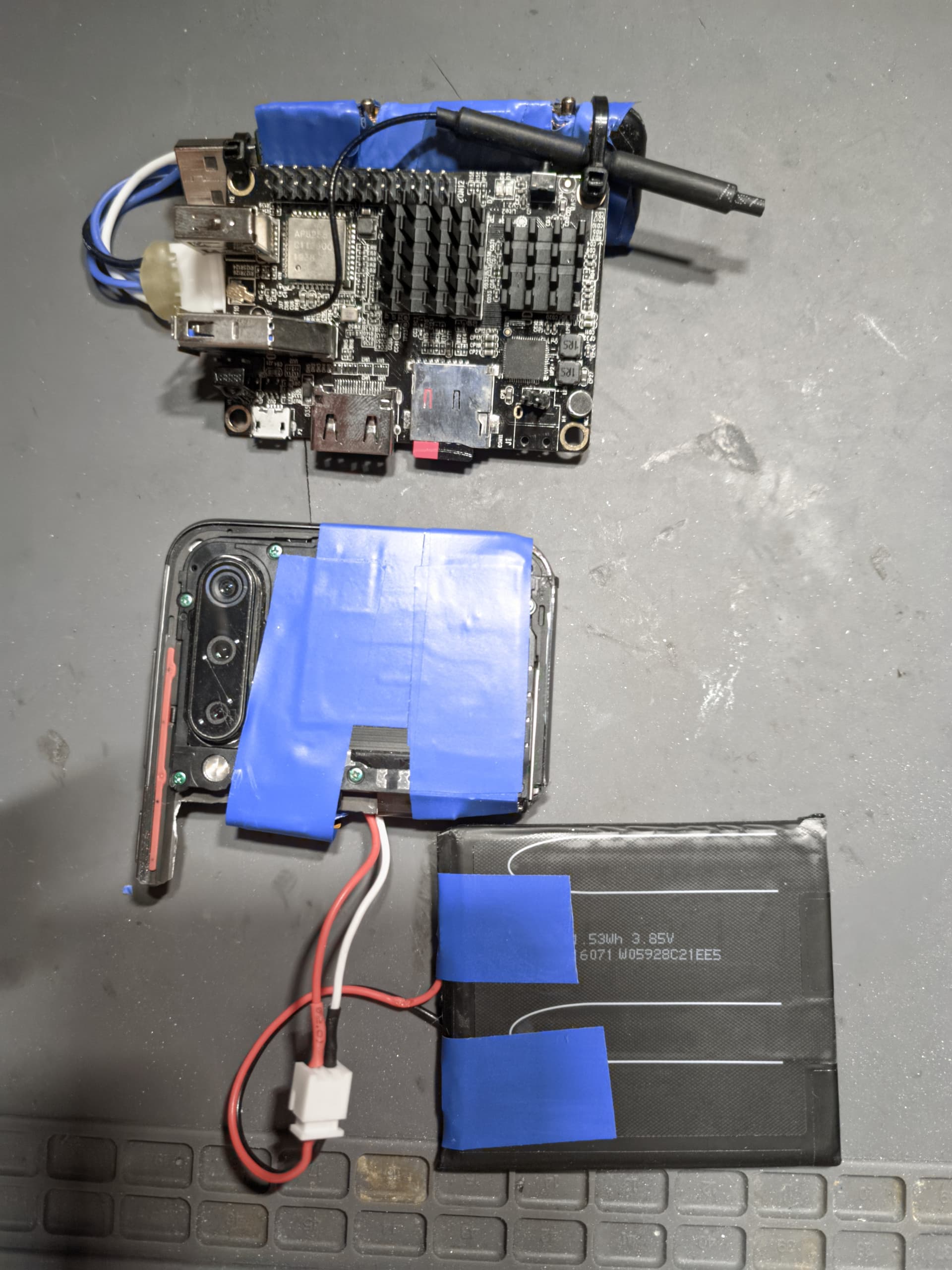
My idea is pretty straightforward: to make a companion computer from a broken Android phone. It has several obvious advantages over my current Orange PI lite 2 with ZTE LTE modem. A phone without a screen and a battery is much smaller and lighter.
I’ve made a cable to connect my Matek F765-WSE directly to Xiaomi’s USB-C OTG, and the Mission Control (Android version) detects both COM ports an connects successfully to Ardupilot onboard.
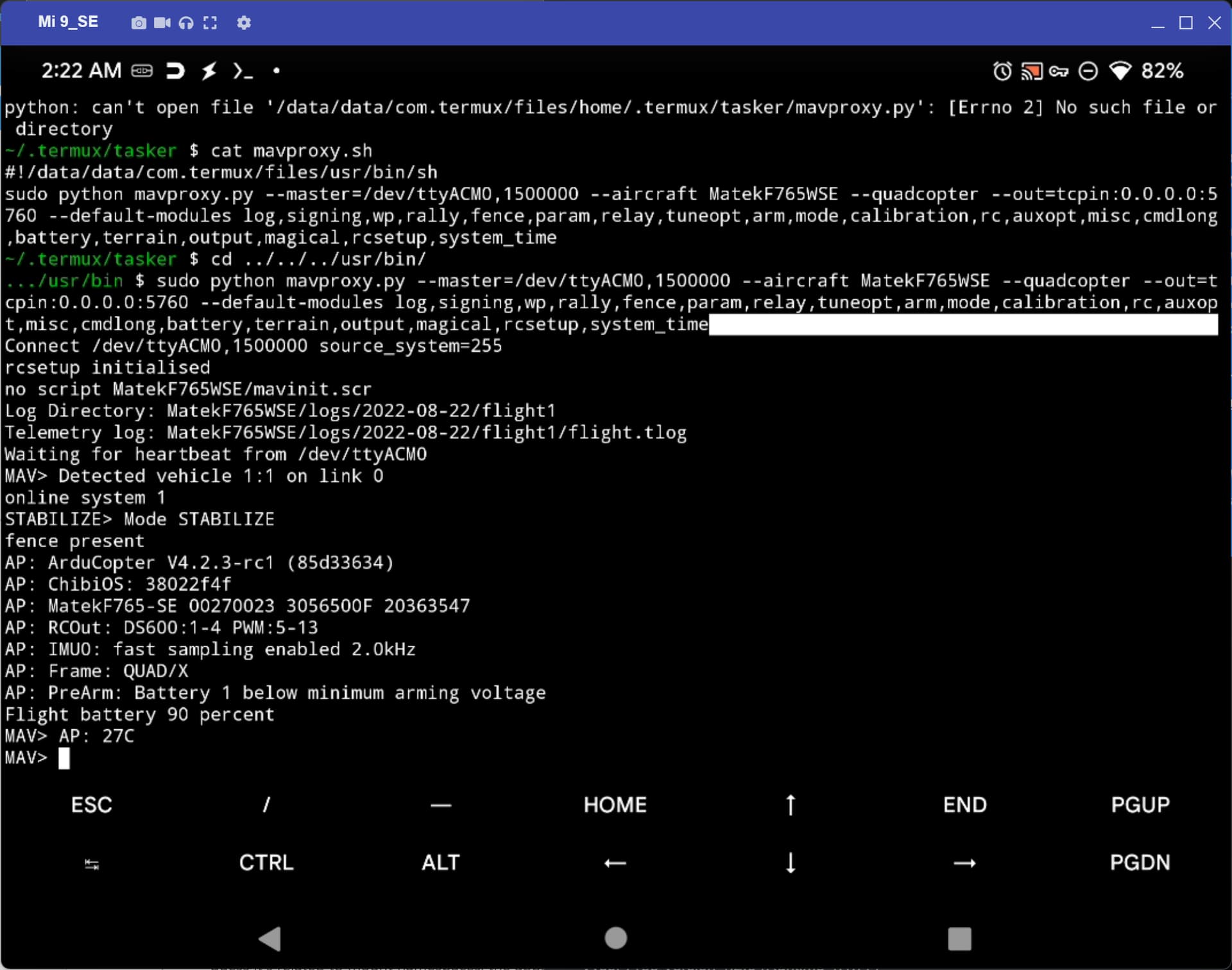
The second thing: I’ve successfully installed Python and MAVProxy inside the Termux, and it’s running fine.
Now it seems I need to access the com/serial/tty port inside the Termux to pass it to MAVProxy. But looks like the current kernel has no any built-in USB Serial support (Matek F765 seems to have CDC ACM adapter).
I guess, now I have to try to build an Android kernel with CONFIG_USB_SERIAL_SIMPLE flag to make a /dev/ttyUSBx device appear when FC is connected. I’ve had some experience with building a kernel for some of my old Android phone.
Also, I’ve discovered for myself the miracle of MQTT and Mosquitto.
I wander, maybe that is the simplest way to forward a UART to a ground station?
If anyone have any experience with this, I would gladly accept any advice)
So, I can say that I’ve made it (despite you didn’t asked).
And it wasn’t so hard as I expected.
I actually had to build a kernel with a CONFIG_USB_ACM=y option for my Matek F765 has this type of USB serial adapter. Also enabled corresponding options for CP210 and FTDI just in case.
Still have to power supply this from the LiPo battery (or not)
Oh, thanks! This totally overlooked this one. Looks promising. Allows to inject GPS and stream video from phones camera. I certainly could use that, but don’t get, if it allows any direct connection with a GSC. The default chain looks like: FC > Andruav-AP > cloud.ardupilot.org > Web browser > npm:andruavplugin > Mission Planner. While with MavProxy: FC > MavProxy > Mission Planner (over my own VPN)
This is much faster that the original approach.
Also the whole solution is free & open-source:
please check: https://github.com/HefnySco/andruav_android_app and other “andruav_” repositories.