Me and my team have decided on building an antenna tracker as we are interested by UAV’S and drones.
Our project includes two parts 1) The flying UAV that will travel around and 2) An antenna tracker to keep track of the drone using GPS.
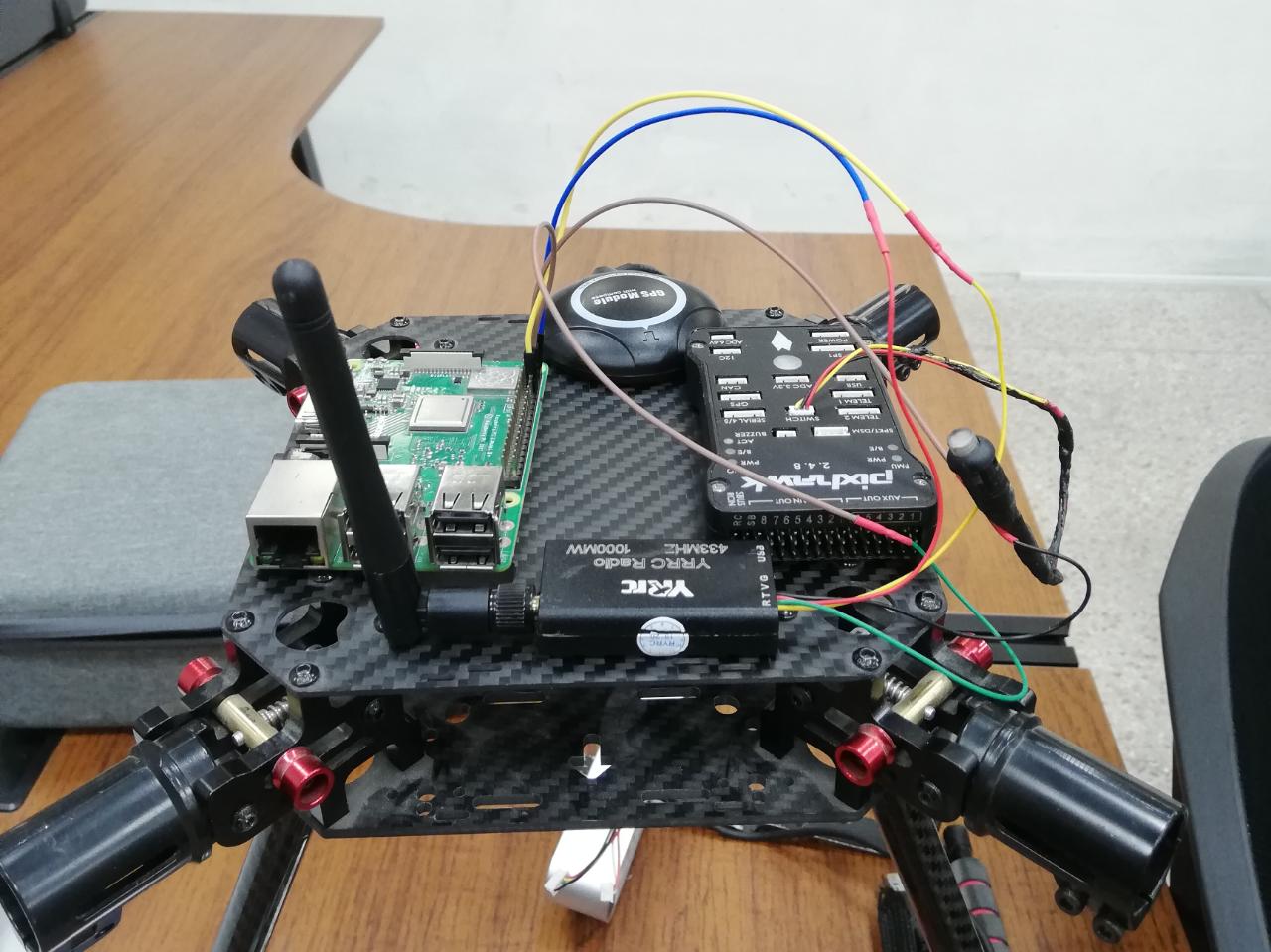
We are using a pixhawk 2.4.8 both the UAV and the Antenna Tracker.
The first part was easy, the problem came when we wanted to connect more than one pixhawk to the mission planner. One pixhawk is fine, two is not right. We have tried using mission planner for the antenna and QgroundControl for the UAV but to no avail. Then we tried a companion computer like Rpi 3b+ but the controller could not be connected to it through TCP (we tried setting up an access point using both APSync and Rpanion server).
We did follow the official Ardupilot wiki and saw how it was made, however we want to see if only one telemetry 3DR can get the job done with the help of a companion computer.
Any help will be appreciated on this as we have been stumped for a good 2 weeks or so on this.
I am missing the global project goal, what are you trying to achieve ?
Do you want to track multiple drones that are flying in a tight SWARM formation using the antenna tracker ?
Yes, but when i try to establish a link between rpi and mission planner. I get failed.
Do you have any solution to establish a data link between RPI and Mission Planner. Or Do you have any other suggestions.
Please enlighten me, Thanks.
Thanks for sharing the link. I’ve already read this post.
This approach uses Patch Antenna or some other type of antenna to track the drone. This methodology has range issues. Different antennas have different ranges depending upon dbi and power.
My problem is I am bound to use GPS data readily available on Mission Planner so that I dont get any range problem.
First , I question the usage of RPI in the configuration as everything could be Based on Flight Controllers (Drone and Antenna tracker).
Second, this is mainly a telecommunication issue as the signal from drone to GCS does countain the necessary messages (Basically GPS coordinates and altitude) that you can transport by different means.
You could use MAVPROXY at the PC level and get the 2 sources of coordinates signals (Skydroid and TCP from the web) being merged at the Laptop.
My concern would be the delay between signal 1 and 2 that could cause erratic positionning results.
Thank you for the quick response. The main goal of this project is to design an antenna tracker using only one gps module on the drone.
The goal being to make it a single package (one drone+ it’s gps and one antenna tracker module). The antenna tracker will be connected to the computer through USB for power.
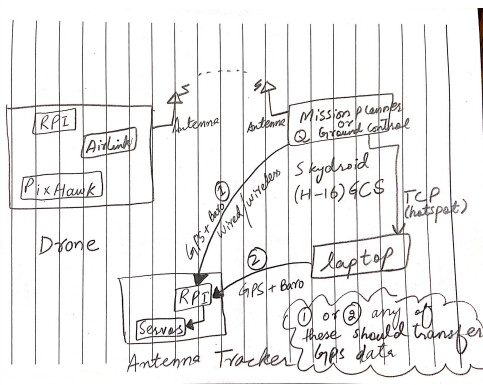
Ok, So we have 1 drone which is transmitting data on skydroid (H16) remote control via telemetry (Air Link). We are successfully receiving that transmitted data. Then the skydroid (H16) further sends the data to Ground Control Station (Which is a PC, in our case) via TCP, hotspot protocol.
So, drone to H16 via Air Link and then H16 to GCS via TCP.
Here, our goal is to extract the GPS data from GCS (laptop) or the Skydroid (H16) and then utilize this data into a microcontroller (It can be Raspberry Pi or PixHawk) to move the servos through a set of Telemetry.
Where one telemetry is connected to GCS (Laptop) and second is connected to Micro Controller.
So far My GCS is connected to Skydroid via TCP (Hotspot) and I am getting the drone data in Mission Planner of GCS. However, When I try to send the data from GCS to any micro controller via Telemetry, I got failed.
So, if you could please help me to establish a connection between GCS and Micro controller. So, that I can take live GPS data of drone (DRONE–>SKYDROID–>GCS–>MICRO CONTROLLER) and move my servos to track the drone.
You run MAVPROXY in a Window PowerShell and use it to receive TCP Telemetry Signal and outputting to your local network (127.0.0.1) for the GCS and to the COM mapped USB port for the Tracker
The thing is that the antenna tracker system has to know its location also, regarding the location of the drone. If the antenna tracker system doesn’t know where it is, it cannot calculate the movements needed to point toward the drone. That’s why it is not enough to stream the GPS coordinate of the drone to the laptop and then the antenna tracker system.
Anyway if you want to do that is just a matter of streaming the NMEA sentences received in the laptop via mavlink to another device.
The antenna tracker uses a GPS to make the course adjustment and the RSSI to fine adjustment and continuous tracking.