CX4: Coaxial Copter, vehicle 4
Lifespan: August 2021, disassembled on August 22nd.
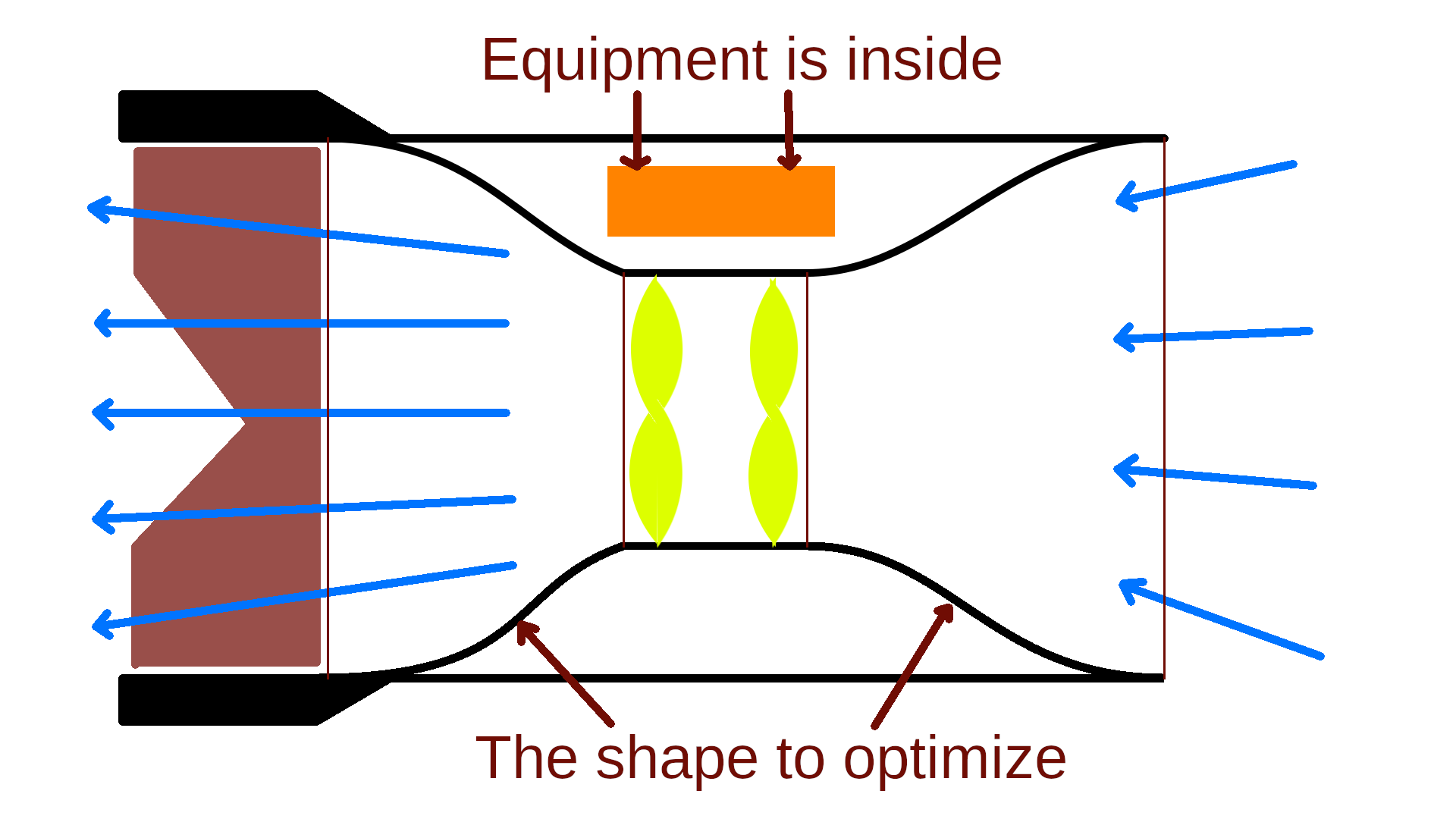
If you look at CX3, you will notice a mess of wires, batteries and other equipment on the outer side of the duct. This all will introduce unwanted drag once the vehicle gets a high vertical velocity, so if you want to do that on a regular basis, you want a smooth outer surface (as well as a smooth inner surface, where the air has a high velocity in any case). Since all the equipment has to be between these surfaces, the design gets somewhat complicated. Among everything else, the shapes should be aerodynamically sound.
If one fixes the inner diameter (based on the available propellers) and the outer diameter (a minimum needed to fit the batteries, the flight controller and so on), the shape of the duct that connects these two diameters is subject to numeric optimization.
Since I am very new in computational fluid dynamics, it took me a lot of time to set up the necessary tool (OpenFOAM in this case), choose a particular solver, make it work, and run an optimizer atop this pipeline. Optimizers are something I am professionally aware of, so I began with the powerful evolution strategy called CMA-ES, and it was the optimizer employed until the very end.
Typically for such a domain, two main problems prevailed: first, the simulation cost (especially if you simulate the actual propellers actually rotating), and second, the choice of the particular objective function. As optimizers tend to optimize the given function itself and not what you actually want from it, the whole process was poisoned with various resonance effects, convergence to boundaries and breaking the laws of physics. This all took a whopping lot of time, but eventually it produced something nicely looking. This is how CX4 was born.
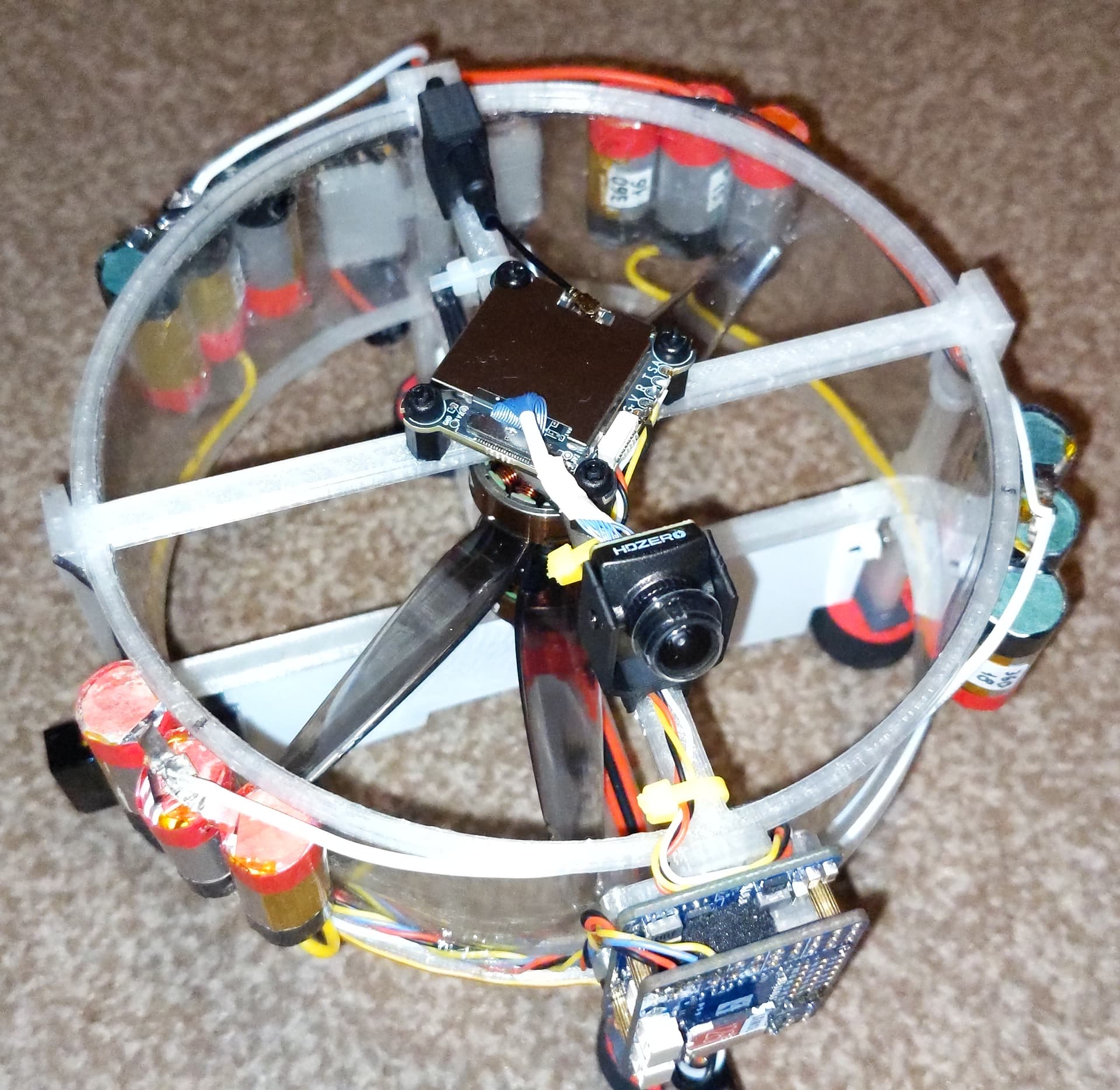
Apart of the complicated, scientifically sophisticated shape, it also featured a Pixracer, which can run the latest ArduCopter, so this is where I finally caught up with the train. For the radio control it used another recent technology, ELRS. It also featured a FPV set consisting of one of the Foxeer cameras and a small-ish transmitter.
The main problem, of course, was the weight. I don’t remember the particular numbers, but it was roughly 850 grams with batteries. But it actually managed to fly.
The second problem was the ArduCopter’s bug which, when everything was configured for DShot, reset trims of servos as well to ridiculous values of 1000. This problem did not exist in APM, as I used plain old PWM with it. Before I understood the root cause and learned how to deal with it, CX4 came to an end.
This was the reason why take-offs were a non-trivial thing, as shown in the video about the indoor tests.
Despite all this, this was the first coaxial copter I managed to fly FPV. There is no side video and no proper sound, but the FPV footage has been recorded.
Although it ended with a spectacular crash, it has shown to me that it is actually possible, and that I can actually design and fly such a thing. More to come.





")