Hi,
I am building a co-axial rotor drone for my project, and this is my first time setting up the drone using Ardupilot Mission Planner. The flight controller that I used for the drone is Mateksys-F405 TE. Below is my wiring diagram;
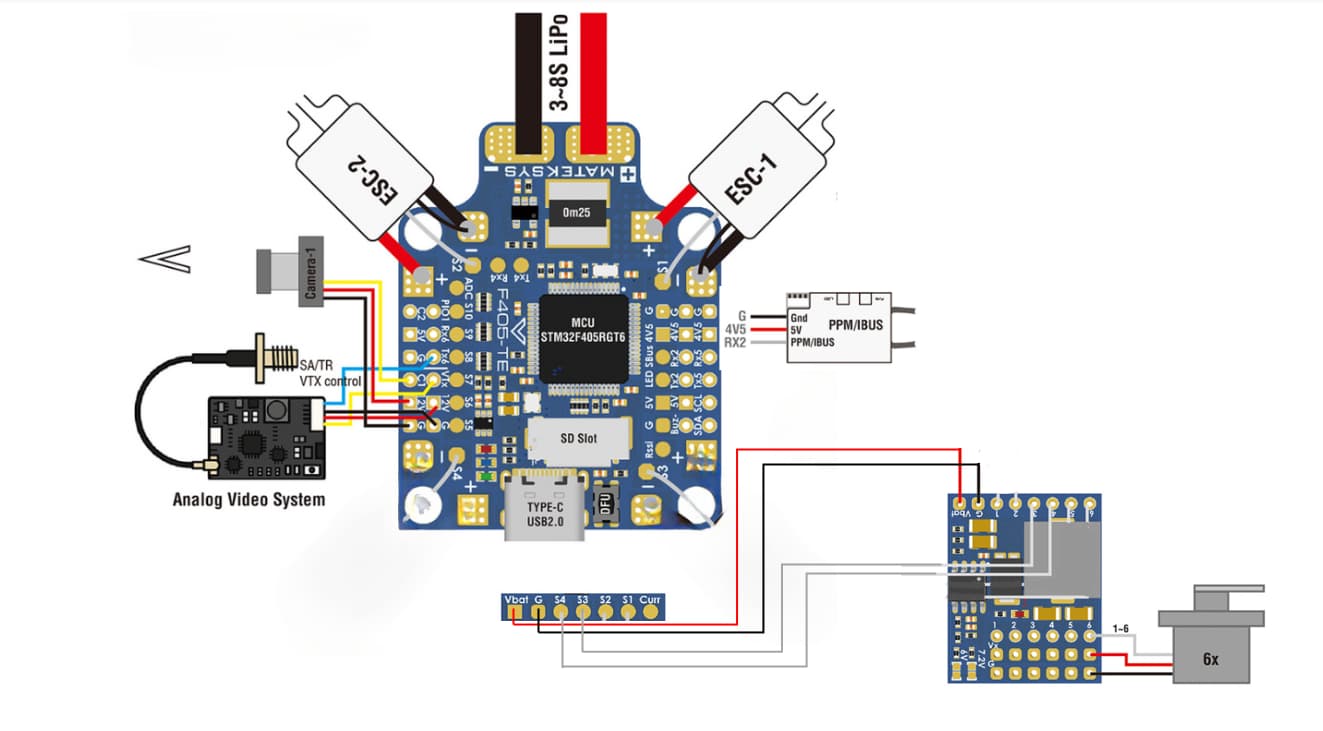
I am having problem in setting up the servo movement in Mission planner. I tried to configure it in ‘Servo Output’ but did not get any response. How do I set up the servo movement for roll and pitch?