Hi everyone,
after being involved with drones for 10 years now I am getting to the point where I’m close to giving up on drones and looking for a different hobby altogether.
The reason ?
So many crashes over the years compared to the actual flight hours which takes the fun out of it all.
…Been flying Octocopter, Hexacopter and more recently a large Quad. Mostly all self build except for two small ones I sometimes just fly for a bit of fun without all the GS setup and telemetry link.
I had some fly aways, one of which was lost for ten months whilst another was never seen again. I had crashes over the years caused by: Prop failure, ESC failure, software issues, multiple GPS related crashes, PM burnout due to poor quality manufacturing, loose solder joint on a battery connector, slow SD card causing FC crash which of course led to drone crash,…
The most recent crash just happened yesterday with a Quad based on a Tarot X4 frame and a 6S Battery / Motor setup. The first drone I had achieving around 20 minute flight time.
Finished the build in late May and by early June performed Auto-tuning during which it suddenly crashed due to burnout of a power module. Turns out was poor quality soldering - unable to handle anywhere near the rated amperage. After about $350.- in parts and a 6 week wait for various parts to arrive it was operational again.
Now I’ve only done about 4 flights since the repair and now once again a crash.

As can be seen not much left in one piece and the fact that I couldn’t find it until this morning and we had rain during the night didn’t help much either.
So essentially over $1000.- in damage for a drone that has had less than 4 hours total flight time!

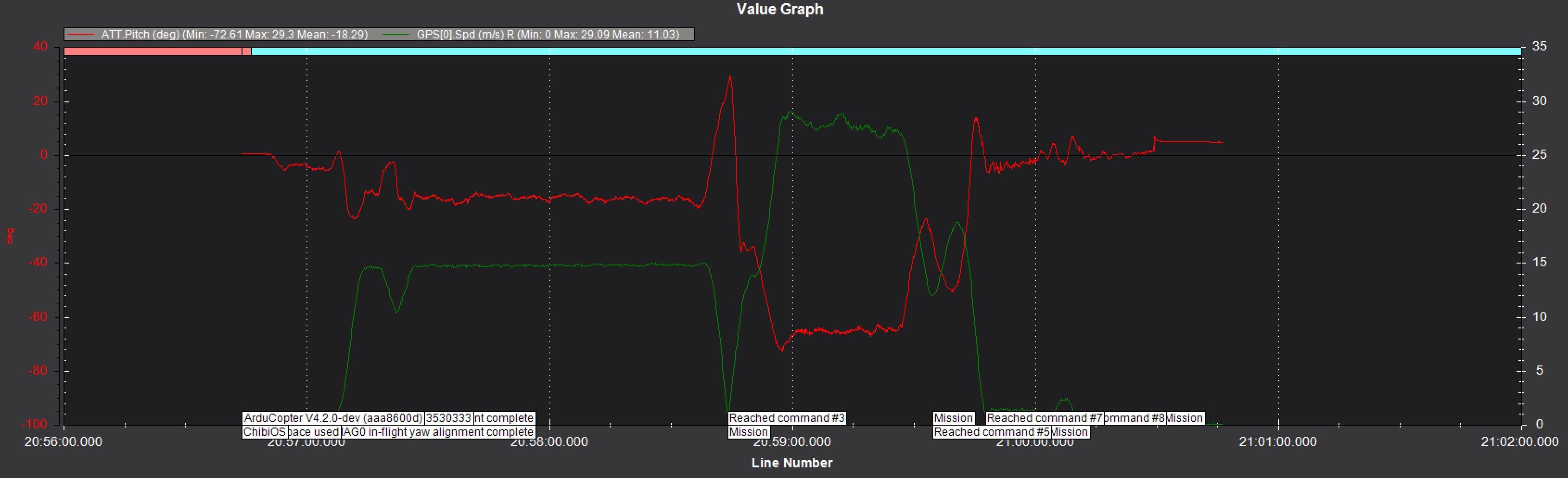
I spent some time looking at the telemetry data ( .bin not retrievable as SD card on FD got smashed as well).
What I struggle with is the fact that everything started well and no problem shown in first minute of flight. Then there was a brief GPS glitch but recovered quickly and continued on its mission. Then there was a EKF variant issue apparently due to compass issues,…which is interesting given that my FC has got 2. Once again it recovered and continued on its mission. But then there was another GPS glitch at which point I tried to initiate a RTL but that was overridden due to the GPS glitch. If that wasn’t bad enough yet another EKF variant occurred, this time related to velocity sensor. Then once again I tried to manually take control but despite the fact that RC signal was received the FC ignored my inputs and proceeded with its own Land command.
Whilst this might be fine in an open field, it is not beneficial over a rainforest like in my case or over water.
So, my questions here:
How can it be that within seconds of each other a GPS glitch is encountered and then EKF variant issues, first related to compass and then to velocity, despite no prior issues or interference?
Been trying to find setting in regards to overriding Land command and having Alt-Hold instead when EKF failsafe is triggered. Does anyone know where to find it ?
Is there a way to have two GPS units attached and in that way redundancy build in ?
…So in a nutshell after spending over $6000.- over the years on various repairs and replacement items I’m just no longer happy proceedimg with it if I can’t achieve a more reliable setup.
Thanks
 and they are cheap. Auto Missions are cool. All around a fun aspect of Ardupilot.
and they are cheap. Auto Missions are cool. All around a fun aspect of Ardupilot.