Cool, and that was an actual mission ?
So far I only managed about 55km/h on my hexa which at the time had 4.0.7 running on it. (manual flight only) Now I’ve got the old APM on it (…hey, I know what you’re thinking, but at least I can still fly that thing rather than having to spend yet more money on another FC)
…But certainly wouldn’t even think trying to fly such a speed in a mission on APM.
Anyway, that new quad made it to 80km/h to my surprise (also manual flight,…as in Stabilize).
Usually don’t care about fast speeds as I been using drones for more practical matters like live video footage, object detection and most recently using a FLIR camera in order to detect feral animals on property. …So in other words more practical use for farm related work.
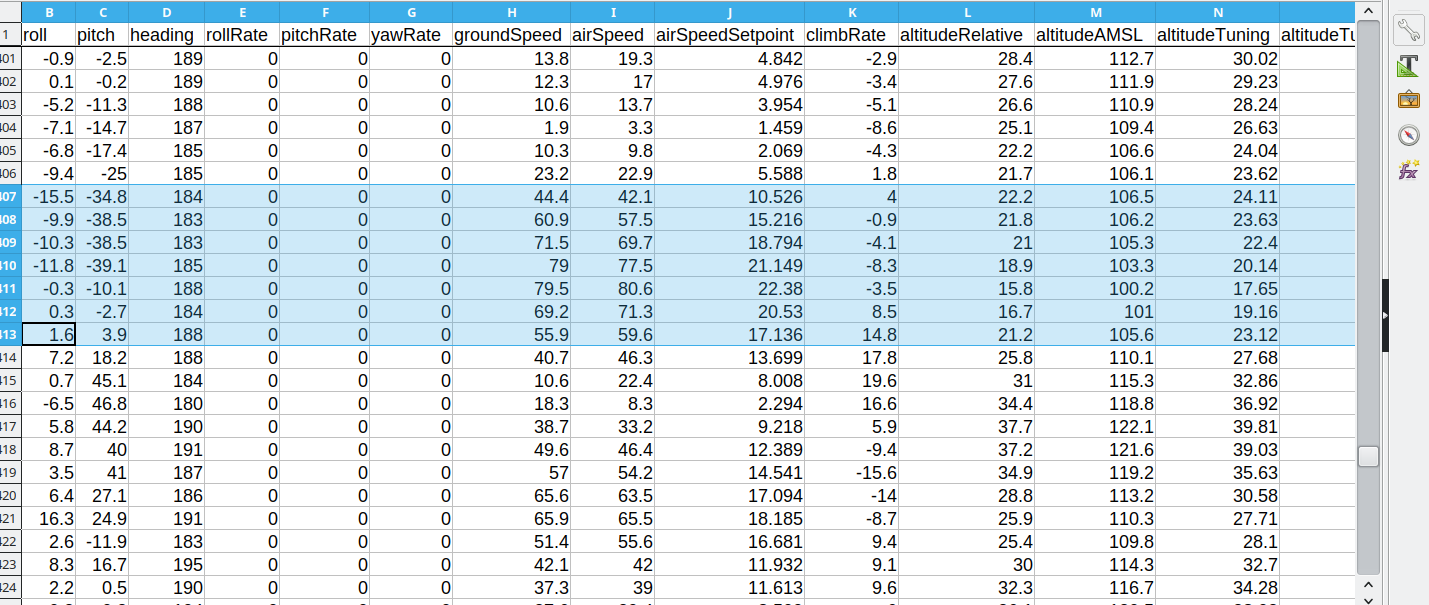
…Just had a look for the .bin file, but appears I’ve deleted it already. However, the GS data file was still there:
How is it going in regards to WP overshoot? I believe that has been often an issues when flying missions at a fast speed.
Or did you use only spline waypoints?
This is no longer an issue with S-curve navigation which has been in the Beta releases for several Revs. 4.1.0 Stable is probably very close (at beta8 now) which will have it. No Spline Waypoints.
I feel your pain ! Some of the reply’s recommend you switch over to plane .
Thats what im into and I can tell you that is far from pretty either !
Last time I flew I had throttle stop responding in flight . I crashed trying to land with cruise throttle setting
but that was better than letting it get lost . I still dont know why it happened .
Between the ever increasing complexity of ardupilot and legendary chinese quality I also would say
the reliability overall is nosediving !
I just got thru building nano talon with h743 FC . I have this thing all setup and tuned as best I could on bench , getting ready to fly .
Once again arduplane says not so fast . Mysterious problems that come and go seemingly at random
is frustrating .
Now I cant arm or disarm outside of mission planner …nothing has changed , it was working fine . There is absolutely no reason for it to be happening ! Also smart audio control only works SOMETIMES !
Once again for no reason .
I go back to the balsa wood days with 72 mhz . Back then we actually managed to make it out to fly once in a while …
Now Im anchored to a workbench playing computer scientist !
Hi Ben,
yes, have to admit I had less GPS related problems with my old APM 2.5 FC compared to now in recent years. I guess one of the reasons is the GPS back then only worked with the regular US-GPS. But these days the GPS units have US, Russian, European and Chinese based GPS systems as source of data, whilst this sounds great it appears it causes at times a “GPS-system overload”
There are many reports dealing with this issue, here are just three:
But in all fairness I have to say many years ago with plain RC flying there have been also various issues, but have to admit more rarely if you’ve looked after the aircraft well.
,a friend of mine totaled once a glider with 3m wingspan. The cause turned out to be back in those days you could have a balsawood arrangement with some wires at the end to operate your control gears via the servos. In my friends case for some reason the balsawood section must have had a crack and suddenly gave way mid flight. As a consequence the elevator snapped into nose down position. …all that was left was a bag full of rubbish.
Regarding the reliability, from my vantage point it has gotten better over the years. Its tough because the software supports an ever growing list of hardware. Back in the day it was just the APM then Pixhawk. I give the developers a lot of credit. They put time into hardware that only a few people use, or that they don’t even have to refer to. Sometimes I wonder if they’re machines, I’ll come back after posting something and there will be a reply and a PR with the issue fixed. Like yesterday, holy cow I just went to the grocery store a fix was coded up for the firmware server while I was gone. Yuri coded some new features into Missionplanner and before i could read what they were, they were included in beta. There is amazing work going on here that we shouldn’t lose sight of. I hope people aren’t too hard on issues they find, the team really seems to try their hardest to avoid problems and fix them when they come up. I know its tough because after a crash there’s lost money and time but everyone is trying their best.
I don’t think the GPS info is relevant today when even relatively cheap modules support 3 constellations. I have a GPS module on 3-4” quads that work very well.
Certainly not complaining about the dev team. Been impressed with them and what they’ve achieved. Also the fact that so many stuck with it for all those years.
But I think it is the fact that there are so many supported FC’s and also now various platforms in regards to MP that are being pushed, that it makes it really hard to get it right for all platforms and combinations possible with various sensors and communication technologies that are now in use.
As in reply to Dave:
I think the GPS issue is in fact still relevant given that you start of with 17 satellites and HDop of around 0.7 and then suddenly get a “GPS glitch” message just after one minute of flight. Then a few seconds later problem appears to be gone only to get a “EKF variants” issue apparently linked to compass despite having two on my FC. If that wasn’t bad enough half a minute later yet another GPS glitch and within seconds another EKF variant issue - this time related to velocity sensor! Given that nothing has changed in regards to speed, height and surroundings, no interference from a close by transmitter source as this happened in a rural location with the nearest house with any sort of technology being 500m away at the time and location where it occurred.
The me that sounds like the tell tail signs of a processing delay either in the FC or perhaps the GPS unit itself causing it as there been various reports about improvements in regards to refresh rates and signal reliability from GPS once only a limited set of satellites is being used instead of all.
…But then again this may just be specific to Navio2 / Rpi FC arrangement as Sebestian mentioned above.
That’s why I find it rather impressive that Dave can achieve very fast mission speeds without a GPS glitch yet I can’t reliably fly a mission at just 25km/h. (I’m on …well, was on 4.0.7)
Anyway, here is one GPS related report from just earlier this year which highlights that there have been still issues. (Can’t speak for the latest beta version as haven’t tested that one ) ( As mentioned may just be related to Navio2 FC)