@tridge@rmackay9
I followed the steps of the wiki and smoothly brushed the Ardupilot ChibiOS 3.6rc7 version of Heli firmware into the FC of OmnnibusF4 Pro V3. In the MP, follow the familiar steps to debug an antique-class traditional aileron helicopter. The previous steps went smoothly. It includes its own interface definition, Bec power supply, servo connection, receiver connection, accelerometer calibration, transmitter calibration, etc., including custom pwm6 for esc control interface. The ground unlocking and esc output control tests, as well as the servo motion test, looked very smooth and should be able to test flight quickly.
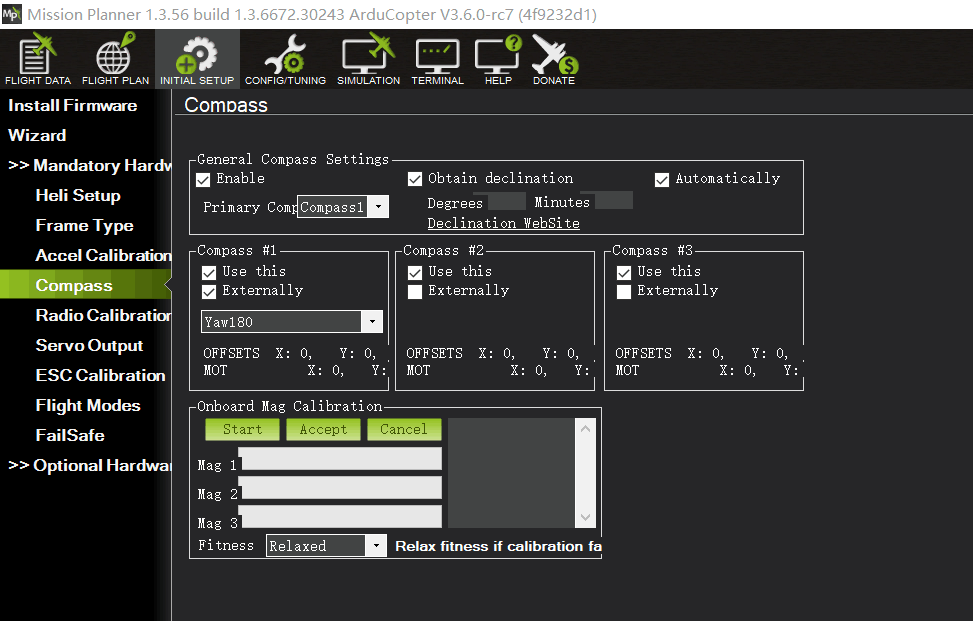
Then, I connected a GPS module with an external compass on Uart6 and prepared to calibrate the external compass according to the previous multiple use. However, on the progress page of the compass calibration, I found that there is no calibration compass on any attempt. Progress bar. No matter whether it is a compass 1, 2 or 3, it does not.
Enter the parameter list, you can see that the ID of the automatically recognized Compass 1 is 466433, but why can’t it be calibrated?
same for me. With the first 3.6 beta release, compass calibration could perfectly be achieved but now it is impossible. Tried relaxing the calibration but no result.
This set of hardware in the iNAV firmware, the compass is all normal, can be identified and smoothly calibrated, I have at least three users on this side to reflect the same problem, I hope the development team attaches importance to this firmware!
my omnibusF4 pro v3 got same problems, I test 4 different GPS(with compass),compass won’t working at all,3 compass not responded,only one got movement when I calibrated,but it can’t finished,it jumping to 0 when over the 99,that is break my heart
Ok, I am also trying to remind the development team to pay attention to this bug, because this is widely happening in the FC of the F4 series. Compared with the iNAV firmware, this bug should be the problem of the Ardupilot ChibiOS firmware.