Can you tell me the exact weight? What day of June will you start shipping? Is it configured in the same way as CX-OF optical flow module? Regards.
Weight:0.68g
I will shipping it to Seeed warehouse tomorrow.
It’s all the same with CX-OF on configuration
1 Like
Did someone actually test this sensor yet?
Or what would be other recommendations?
Okay. Could you provide us a discount coupon for “early adopters”? 
I will buy 8 units. I think I deserve a discount coupon… 
Waiting for your response to conclude my purchase.
Regards!
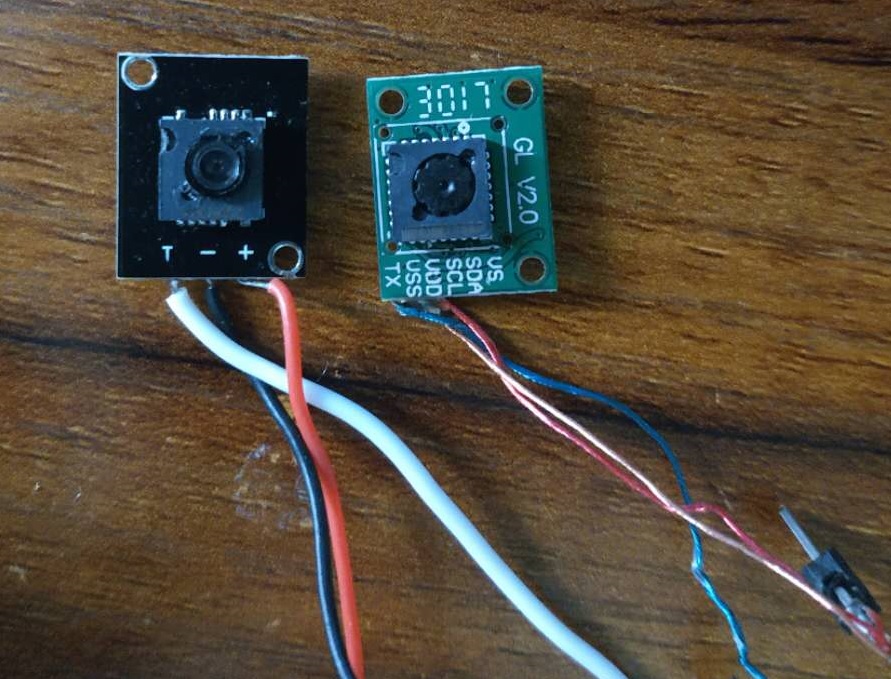
I’ve tested “FPV RC Drone Optical Flow Module”, using CX-OF setting, and it works very well.
1 Like
@MissionHou, great, I’ll add it to the wiki.
@bys_1123, I’m going to add the Seed Warehouse one to the wiki as well.
Is this very hot while working?
Yes It is a little hot,I tested the currents of three kind of optical flow modules:
FPV RC Drone Optical Flow Module Voltage:3.3V Current:78mA
ThoneFlow-3901U UART Voltage:3.3V Current:7mA
CX-OF Voltage:3.3V Current:11mA
1 Like
Hi all,
I have three optical flow sensors (Cheerson CX-OF, HereFlow and ThoneFlow-3901U) that I could not run in Pixracer-R15 with Copter-3.6.8 and Copter-3.7-dev. Whenever I configure the required parameters according to the wiki, I receive the following error messages in Mission Planner: EKF2 IMU1 has stopped aiding, while the gyroscope slowly drifts to the left until it reaches about 35 degrees of inclination, which makes it impossible to fly the drone in any mode.
I made sure to place the sensors in the correct way in all cases.
@winstonsaz have you tried with EKF3?
Yes, I tried it again today, the same problem, I would like to know if someone with a pixracer has used some of the optical flow sensors successfully.
In this thread (towards the beginning) there are posts by @ppoirier and by me relative to test with pixracer and cx-of with mixed results.
If I have the time I will do some tests in the we.
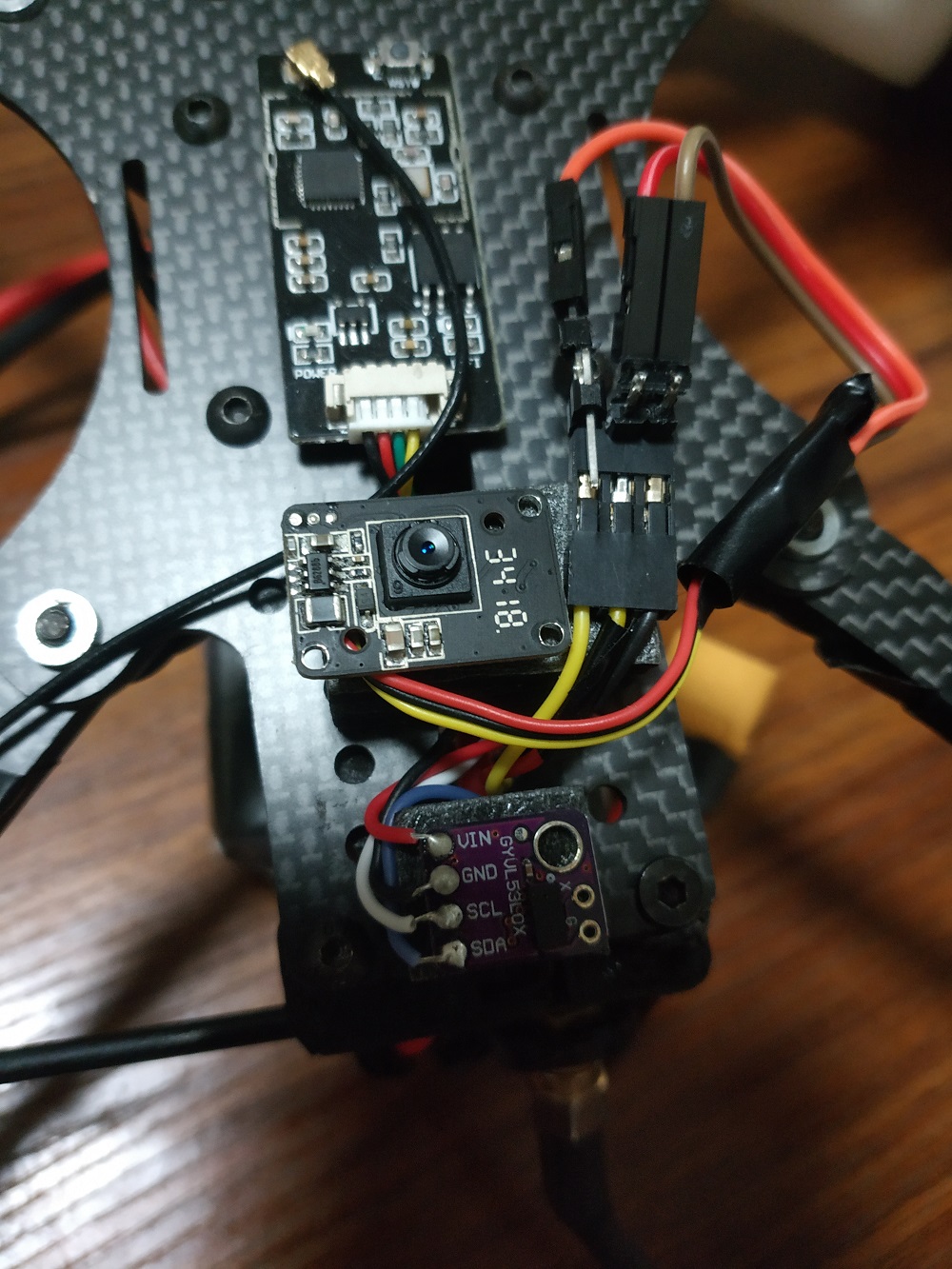
@winstonsaz I tested CX-OF with TFmini rangefinder on my QuadX 250 with Pixracer and ArduCopter V3.7.0-dev (04ebb9de) and I didn’t have the problems described by you.
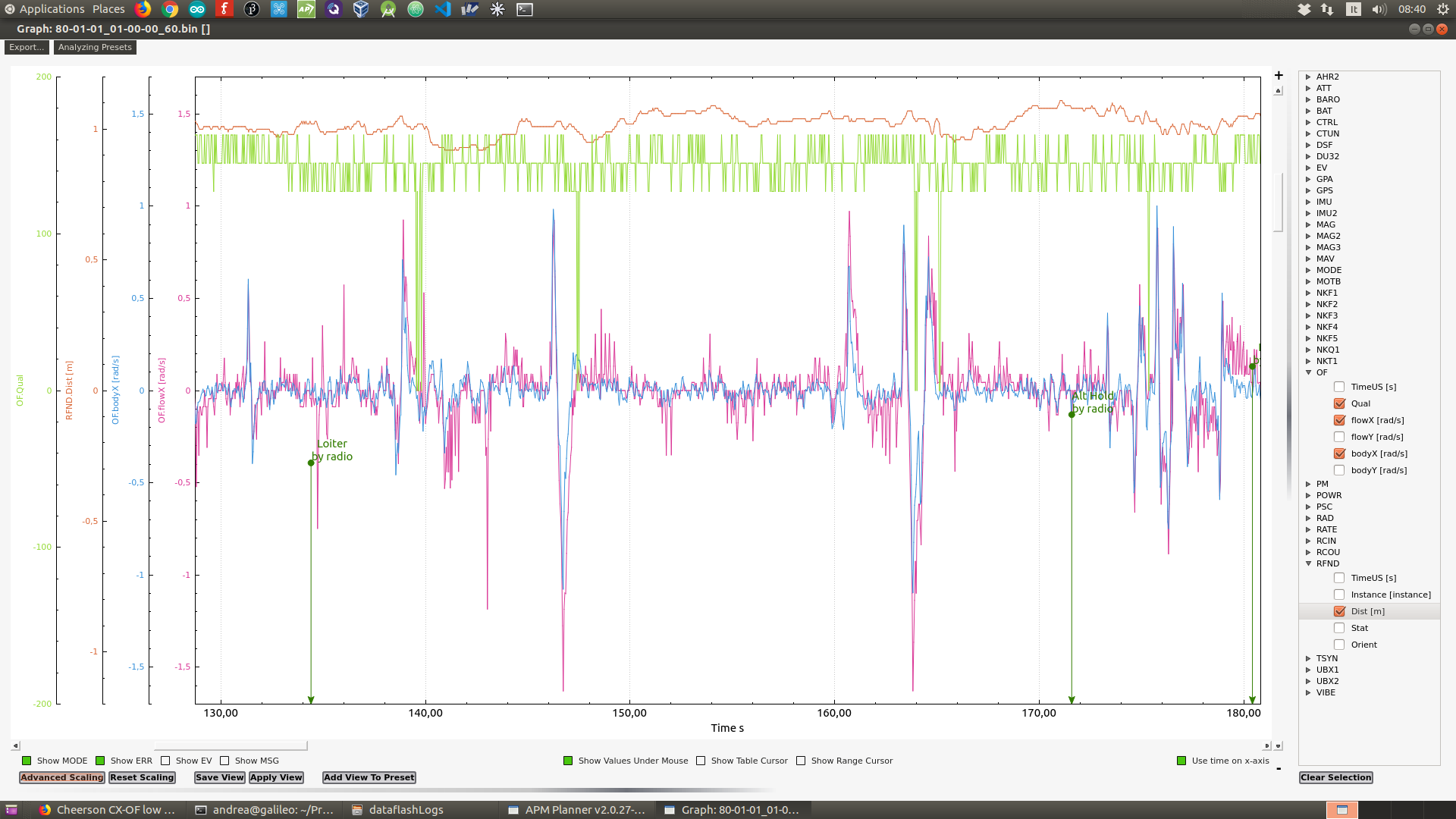
I only did a little indoor test flight with the Quad quite stable in Loiter mode, not so stable as I thought but maybe the cause could be the type of floor and lighting. I see a Qual value around 150 with some point going to 0. I attach a plot.
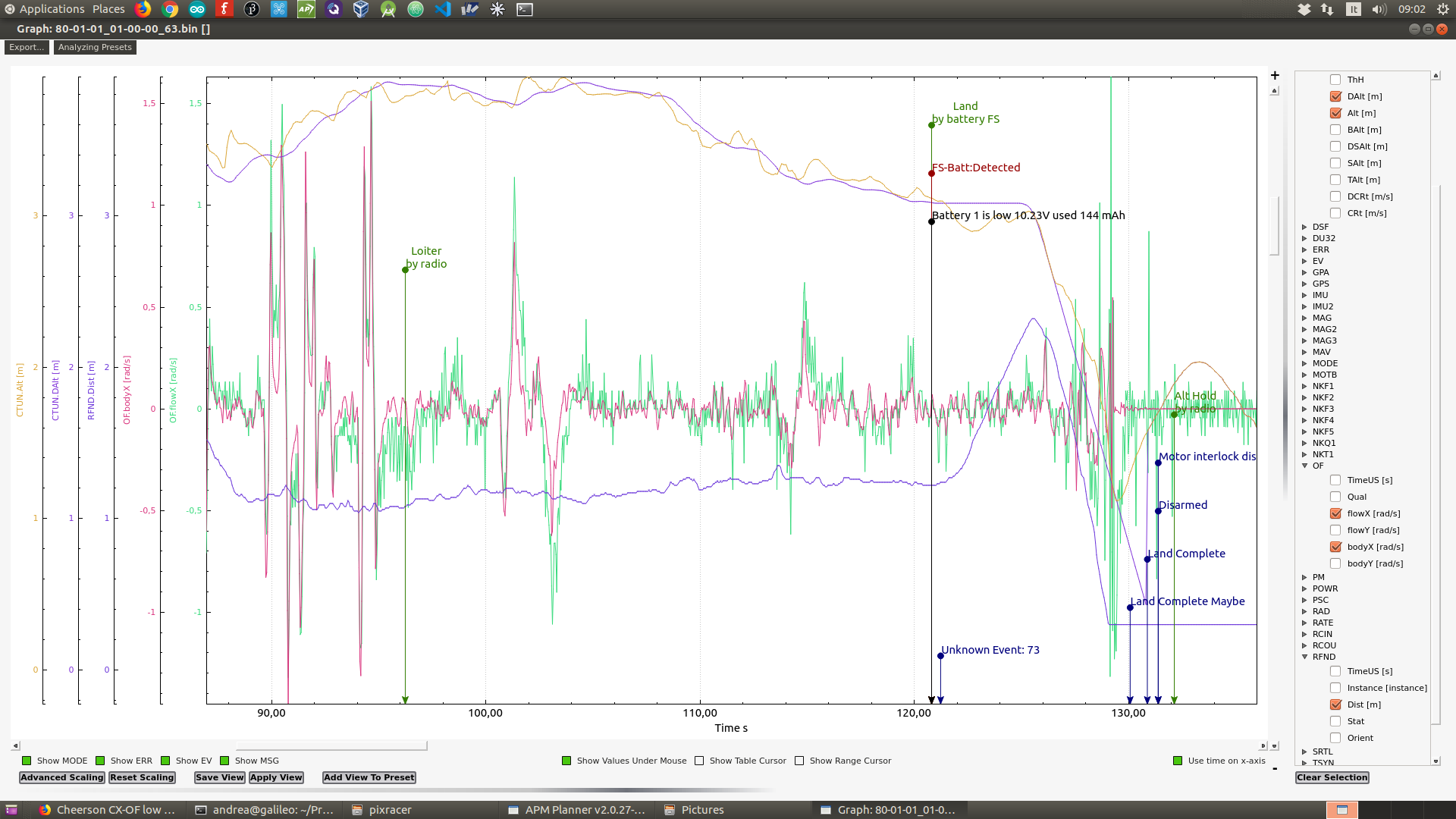
In another test flight with same configuration as per previous post I saw a strange behavior: on battery failsafe the copter instead of landing keep going toward the roof and I had to land by hand with throttle.
I don’ think that this is OF related, it could be related to some problem in the 3.7dev, maybe I have to open an issue about this problem.
RTL will normally climb to the altitude held in the RTL_ALT parameter. Perhaps try changing the battery failsafe behavior to be LAND. Failsafe are described on the wiki (sorry I can’t immediately provide a link)
thanks @rmackay9, in my parameters I already have falisafe to LAND:
BATT_FS_LOW_ACT 1
this is the log relative to the plot above:
EDIT: the file previously uploaded was corrupted, this is OK:
80-01-01_01-00-00_63.zip (567.4 KB)
Thanks for the test, my frame is very small and I do not have enough space to use both sensors (Optical Flow + TFmini), the tests I did was only with the Optical Flow sensor, using the FlowHold flight mode.
I will test my copter with rangefinder disabled in FlowHold ASAP and will let you know.
Excellent. I await the results.