Hello,
Recently, I been trying to change the yaw orientation of the copter via pymavlink, but it is still not working. I used set_position_target_local_ned_encode because there are components such at yaw and yaw rate which I can use to control the yaw of the copter. I then send the message, but nothing it happening. I am trying to turn the copter to a specific radian (2 * pi), here is what I got right now:
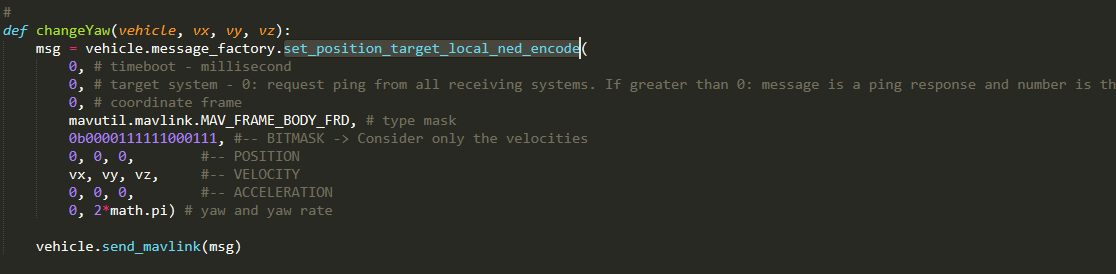
If anyone can help, that would be great, thanks.