Hi all. I’m trying to move from LibrePilot to Ardupilot, so I’ve installed the 4.0.3 (last stable) version of the firmware into a CCD3D Revolution Mini using the “bootloader” version of the firmware image.
Flashing was goood anf I’m able to connect the Revo Mini to Mission planner using USB and see the data from the sensors and RC.
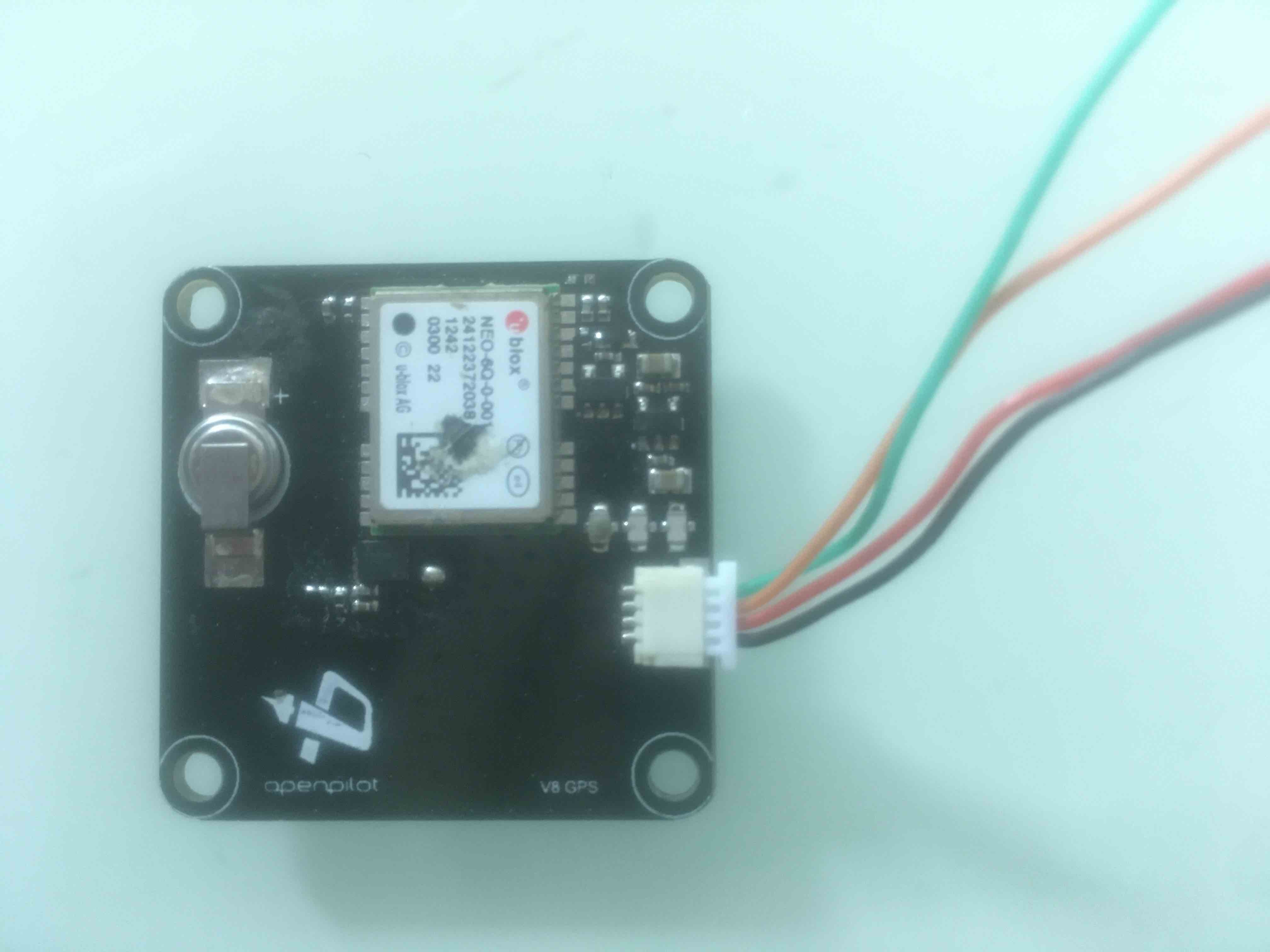
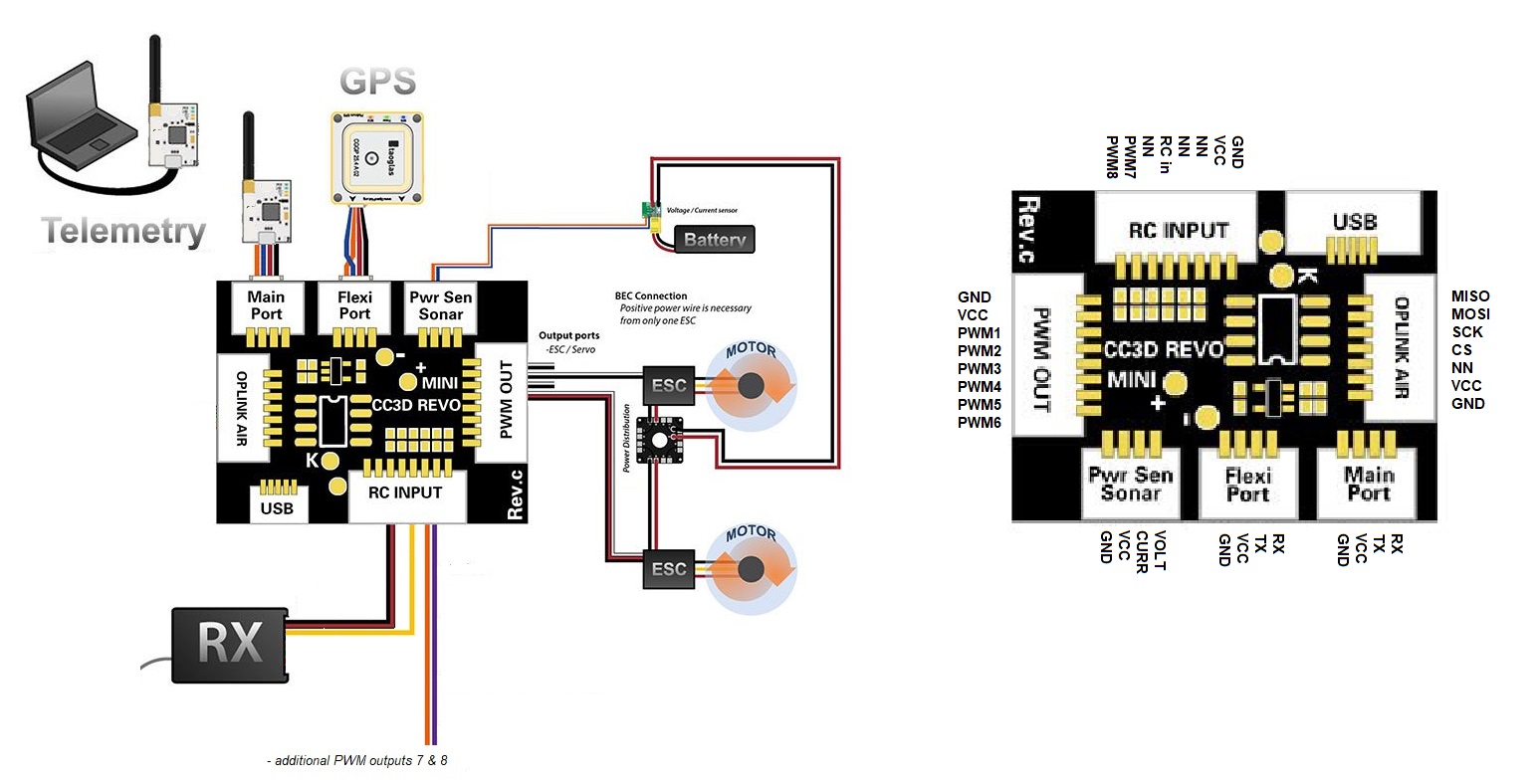
I’ve connected the “OP GPS” to Flexy port too but I always get “NO GPS” message on mission planner.
I’m missing some configuration or there is some known compatibility problems ?
Welcome here Fulvio
I came from Open/Libre like a year ago for a sail project using a Revo mini.
It does work with a GPS, but maybe not necessarily the OP GPS unit.
You may need to look for a another unit that clearly indicates what the separate connectors are used for.
I think we were a bit spoiled over there since we got both gps and external mag to work with just one connection with 4 wires. Here I have so far found no other way than to connect the gps to serial 3 (2 wires) and then the external mag via i2c (2 wires) and then of course you need 5V and ground wires, total 6 wires.
That configuration looks fine to me.
The problem I think is the OP GPS, its pretty outdated now and uses OP protocol.
I have one of these, similar to yours?
I don’t think you will get it to work using Ardu firmwares.
But I think you should be able just to keep your current gps configurations and connect for example the unit Beitian BN220 (compass only) and t will work, smaller but better.
Hi all, I’d like to share that is possibile to use the “OP GPS” with ardupilot without modifications. It has to be connected to “flexy port” (as documented) and ardupilot is able to understand it using UBX protocol. The Ardupilot setup is the default ones.
Hi Karl, I need your help. I saw your car and boat project on the librepilot forum. Unfortunately I can not subscribe to that forum and so I could not download the uav file. What I have designed is a trolling motor managed by CC3D revolution. Basically, the project completely follows your old machine project.
Everything seems to work well also considering the simplicity of the set up (a reversible motor for the trotthle and another reversible motor for the steering). Problems arise with the configuration of flight modes. I know this would not be the right forum but I didn’t know how to contact you otherwise. If you can help me, I look forward to hearing from you and thank you anyway.
Hi Karl, I still have some problems with the internal compass of the cc3d. My gps (NEO M8N GPS) works fine but I don’t know how to connect the external compass (two wires). The flexi port is occupied by the gps, the main port by the telemetry, I really don’t know how to connect this compass… Thanks in advance for your answer.
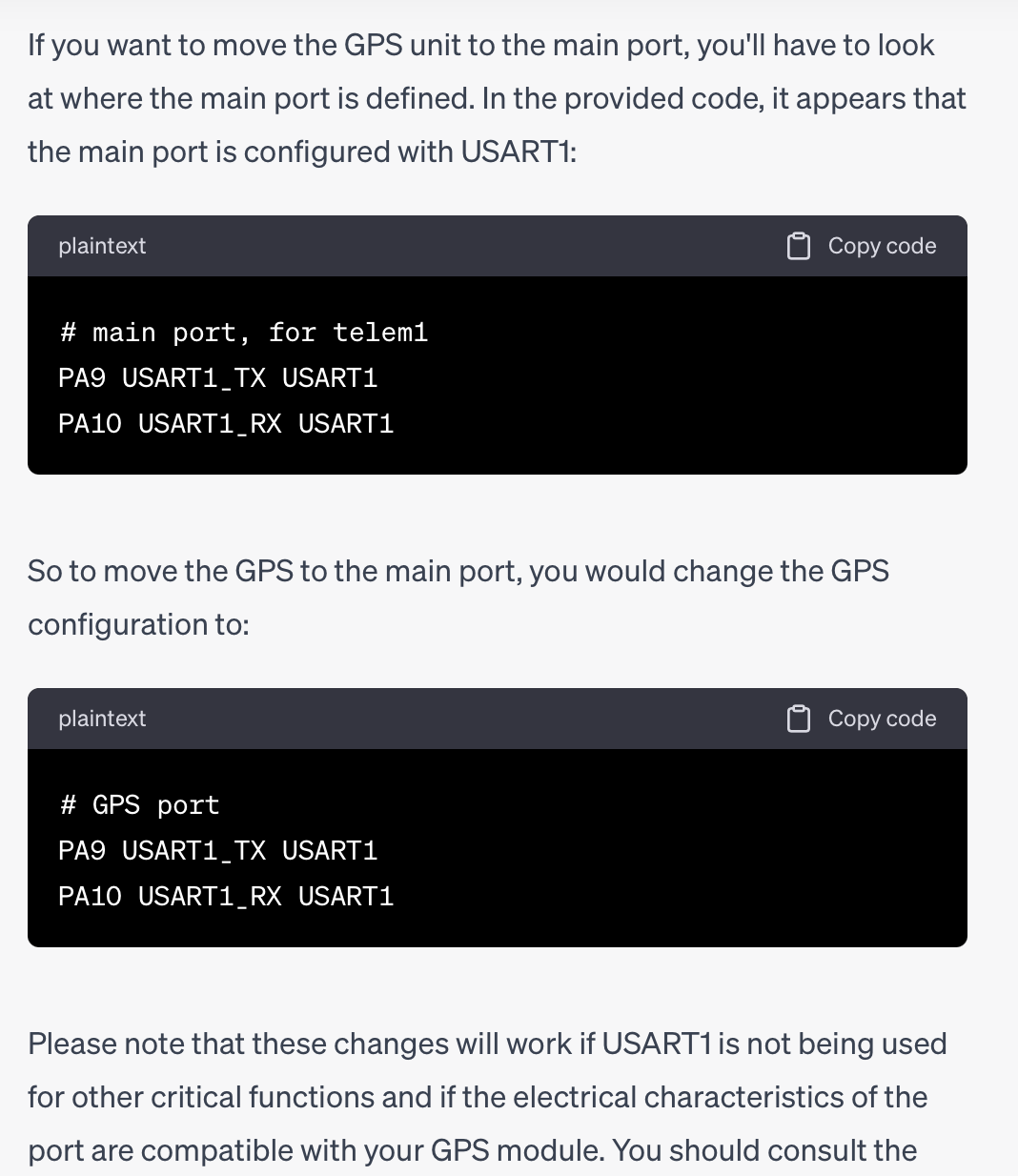
In fact, it seemed too easy to me. Unfortunately I’m not able to compile my version. In any case I would have to give up the telemetry. In fact, in the main port I could connect the gps, while in the flexi port the compass (I2C connection). So the only alternative would be to connect telemetry via USB. Too bad, the connection via bluetooth was so convenient…It doesn’t matter and thanks for the support.
PS Maybe a solution is here:
would it allow me to move the gps to the flex I/O port… If anyone can advise me…thanks
With this you could connect the Compass on the Flexi port being configured as an i2c port, and the gps on the main port. but giving up telemetry other than on usb.
I think…