We were flying a big 4.5kg Quadcopter X with 4 Turnigy G60 500kV and 18x6.5 props for the first time. Something went really bad. All normal calibration and setup was done, nothing changed from PID gains, just the original values that come with ArduCopter.
Some guess on how this turned into a big chrash?
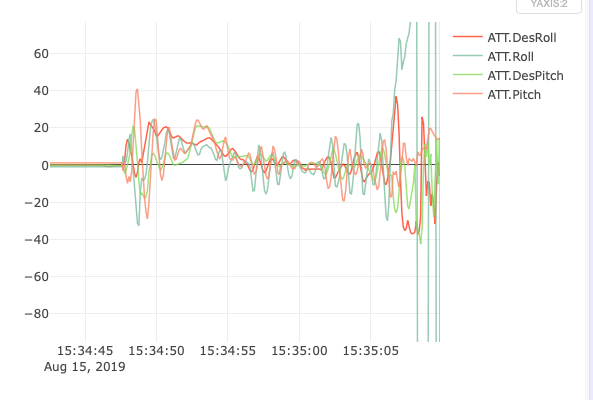
It took off roughly in Loiter mode, started to drift a little but we managed to bring it back. When trying to land we couldan’t.
Do you have any ideas and advice on what to do with our next flight?
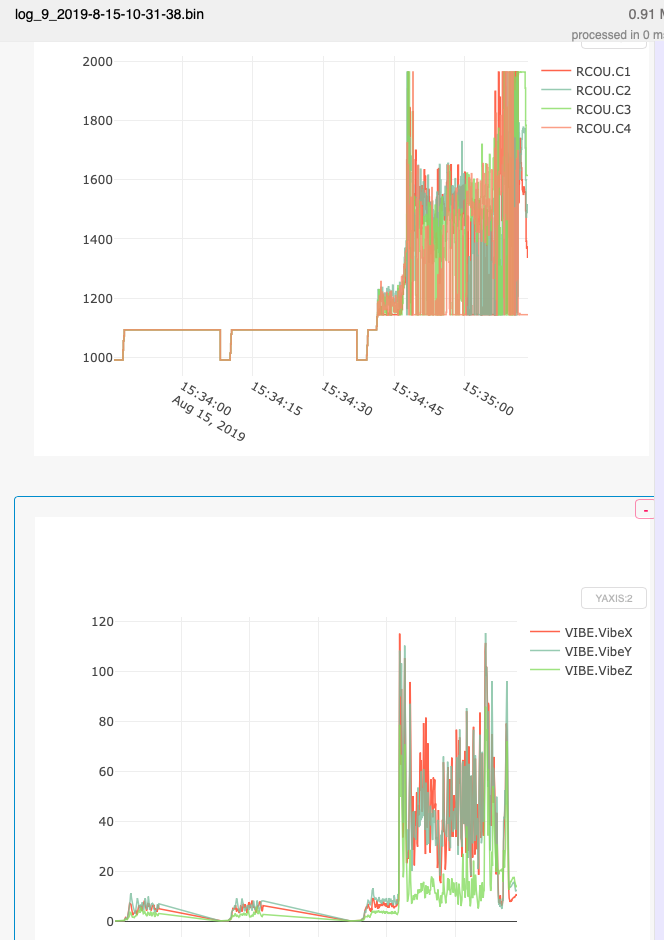
Is there anyway we could check vibrations before accelerating the motors? We saw a little vibration when we armed the vehicle, but we didn’t know it could lead to a crash.
Victor Hugo Turcato
First things first. Remove propellers, get the calibration correct.
Assuming you have done Accelerometer, Compass, Radio calibration and set failsafe,
Set BRD_SAFETYENABLE=0
1.Put the throttle stick to maximum
2. Connect battery (you’ll notice red and blue lights blinking rapidly)
3. Disconnect battery and connect again keeping the throttle stick at maximum
4. Now you’ll here CubePilot boot and motor arming sound. Wait for initial beeps on ESCs and pull the stick down.
5. ESCs should make the sound of boot completion. Increase throttle to check whether all motor start-up and spool equally. At this point, all motor pwm values are directly sent to ESC.
6. Disconnect and reconnect. ESCs are calibrated.
Set BRD_SAFETYENABLE back to 1 after calibration.
We checked here and the ESCs were not really calibrated at all. The ‘beeps’ pattern emitted during this ESC calibration is a little bit different from what is described in Arducopter guide, and lead us to an incorrect calibration procedure.
@mlebret@Mallikarjun_SE It is not the first time that when we try to land a quadcopter X in Loiter mode, the landing is not recognized by the autopilot system, leading to an unstable behavior, which already damaged some props. We had this problem with a smaller model twice.
Hey @xfacta
Did you try flying in STABILIZE and ALTHold mode?
You don’t need ground effect parameters unless you really have problem with landing. Send a screenshot of your gains.
I would suggest to keep MOT_THST_EXPO as default. Try flying in STABILIZE mode let me know the results.