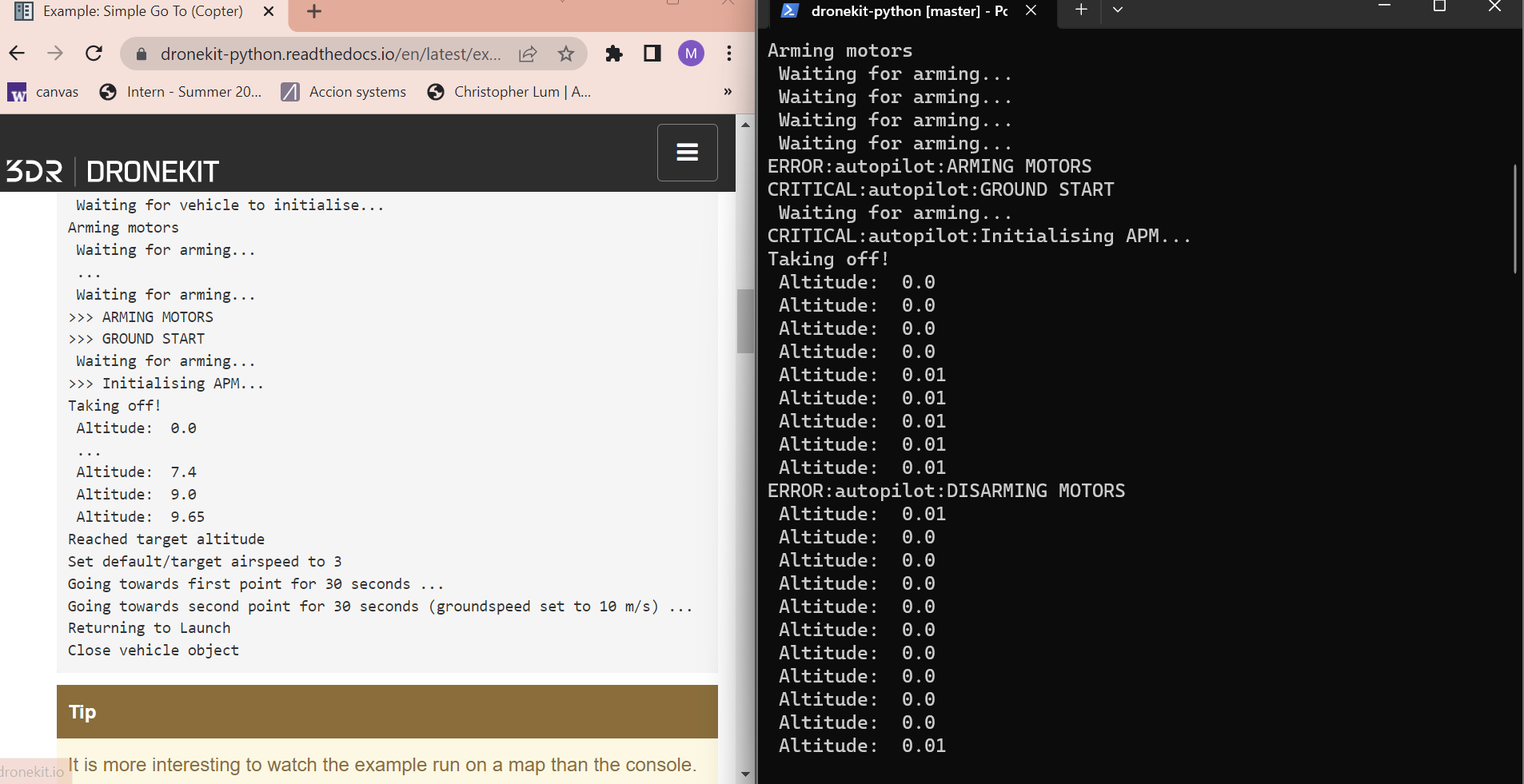
I am new to working with the dronekit and python interface and am currently having trouble running the simple go to example. It looks like copter becomes disarmed before reaching the target altitude as it should in the example. I have included a picture of my output in powershell. Any suggestions on what I should fix? Thank you very much for the help!