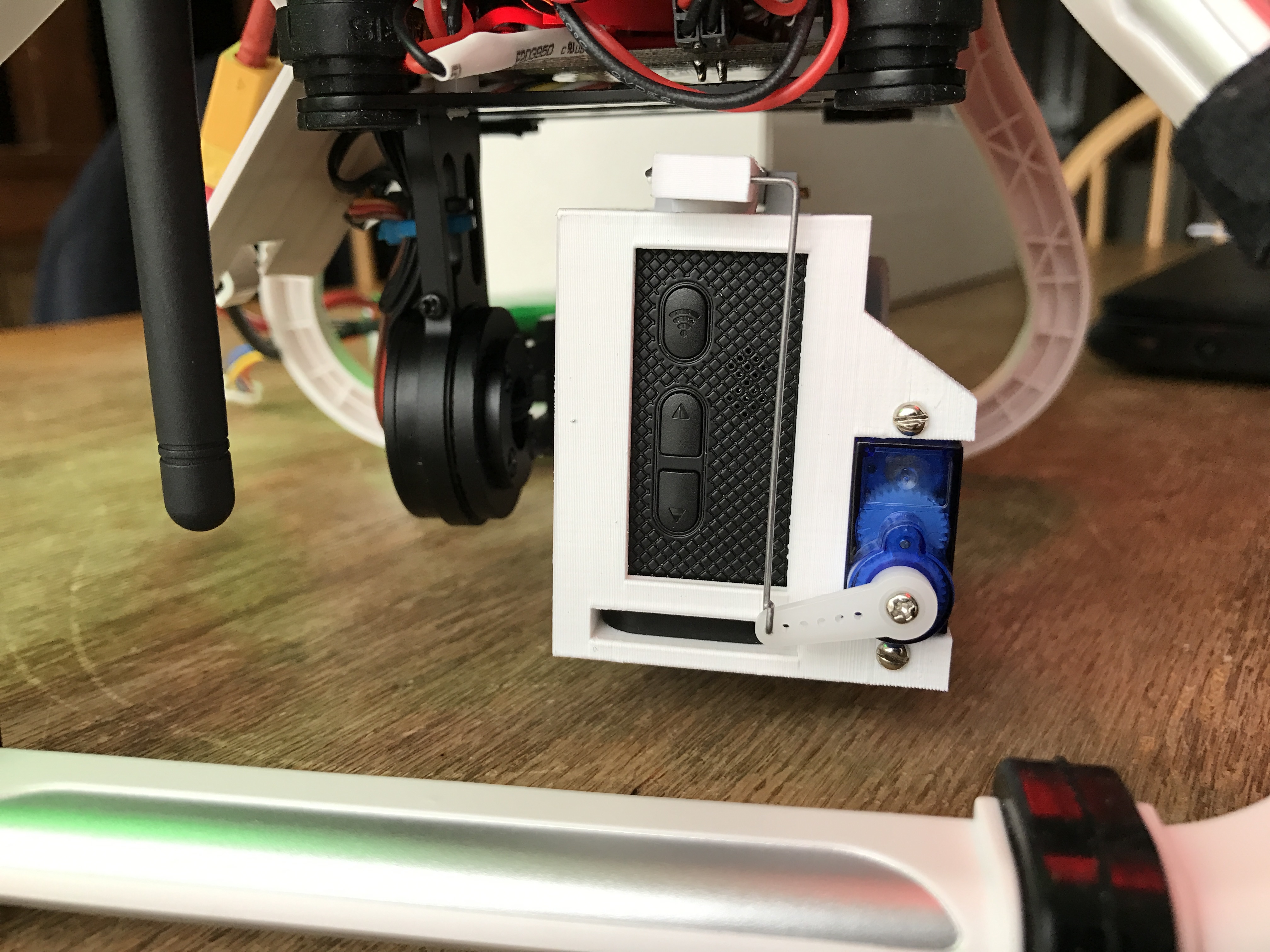
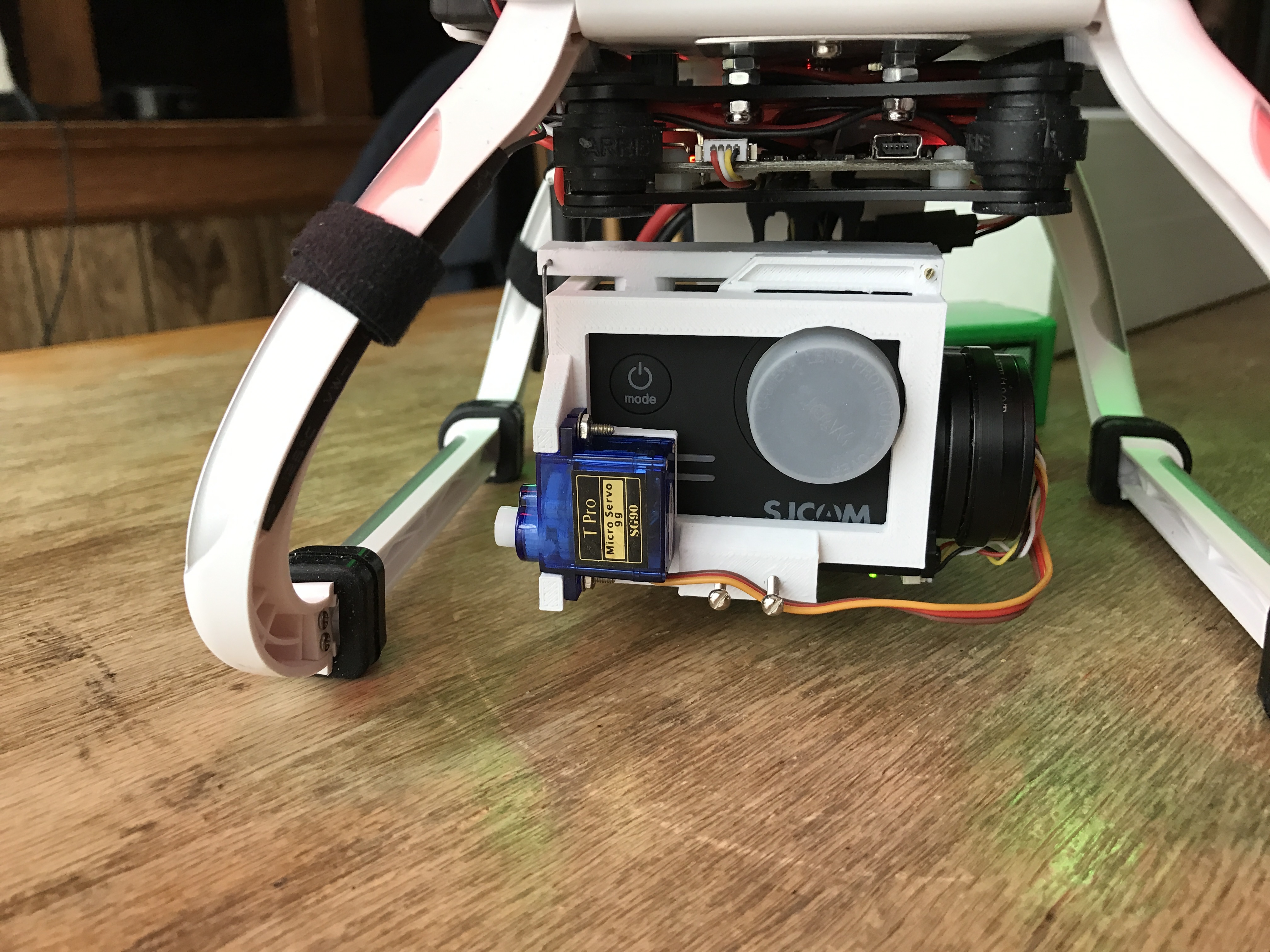
I have a Hobby King Nova Pro quadcopter that uses an APM 2.5 or 2.6 that I’m trying to setup for aerial surveying. I have installed a generic 2-axis gimbal/controller, which works fine, and a GoPro-like camera (SJ5000X) in a 3D printed frame I designed to hold the camera and a servo for triggering the camera. I powered the servo with a small 5v BEC, and have its signal wire plugged into A11 on the APM. I’ve set the trigger type to Servo, and the camera trigger port to A11 in mission planner.
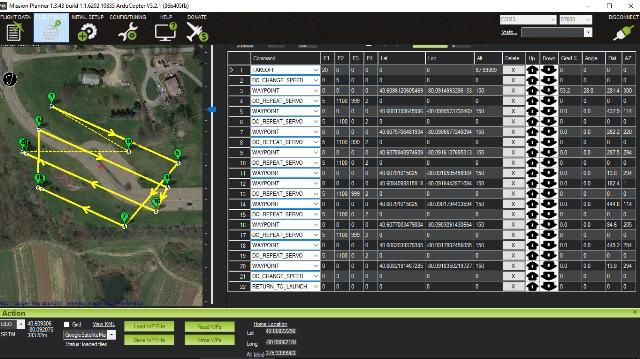
I’d like to set the proper servo limits for the camera trigger servo, but I can’t get the servo to move. I have seen it twitch when powering up so I know it has power and is receiving some sort of signal. I tried using the Trigger Camera Here command in the Flight Data map window, and have tried flying a trial survey mission, but the camera trigger servo isn’t taking pictures. I’ve checked the camera and it seems to be set properly.
Does a servo not work for triggering the camera in Copter?
Otherwise, any suggestions?
I’ve already sent for a servo tester with a digital PWM value readout so I can get the right servo limit values needed for my setup. I need help getting the servo to trigger when called on to do so by the APM.
Thanks