I can only second Dave. An electronics shop that uses its customers as a cheap way to dispose obselete electronics, does not deserve a second visit
And, the last version of firmware that the APM will run doesn’t have some sophisticated spraying features that a Flight Controller running Arducopter current versions would. How many outputs do you need in addition to the motors?
“These are all obsolete. Find another hobby shop.”
Looks like I have to.
“Did you have the APM2.6 lying around for several years, or is your flightcontrol odyssey from recent times?” just bought it from my local hobby shop… should have made my research before trusting them.
“You must make sure all trims are centered, no expo, no mixers and no dual rates are set in your transmitter.”
Not sure what you mean by “no expo” and “no mixers” or “centered trims”, I’m fairly new to drone crafting. If you mean the messy cables, I just want to make sure it works before I trim everything and attach it to the frame.
“If your ESCs worked with a value of about 1060us, the 1100+us seen in the video for low throttle are too high.”
How can I change those values though?
“And, the last version of firmware that the APM will run doesn’t have some sophisticated spraying features that a Flight Controller running Arducopter current versions would. How many outputs do you need in addition to the motors?”
I can add the “spraying features” with an external Arduino board attached to the drone. Will also attach one to the controller I have for transmitting to the “Spraying Unit”.
As long as I can get the thing fly, Rest will be easy.
It’s already easy with current functionality. I don’t see much point in using an Arduino to do what’s already there.
https://ardupilot.org/copter/docs/sprayer.html
Perhaps the best path for you is a cheap Pixhawk 2.4.8 Flight Controller. It will run the latest version of firmware and have all available features. The peripherals you have for the APM (GPS, power module, etc.) will all work. I don’t know where you are but these are available on eBay, Amazon and just about every Chinese vendor of RC stuff.
So I did some research on my local shop and found a
“MINI PIX Pixhawk 2.4.8 32bit ARM”
Does this also work for me like the “Pixhawk 2.4.8” ? or should I look or a normal one. Looks like I can’t trust my local shops so I will trust you guys.
My shop has a photo of it as a set:

I wouldn’t buy that Flight Controller. That is one of the more obscure “Mini Pixhawks” around. There was a recent post about it:
Unless you need a small form factor FC just go with the Full size 2.4.8. Or if you do need a small FC there are many good choices from Matek and HolyBro.
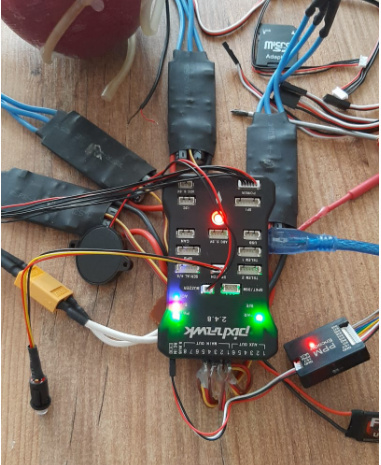
So, I got my Pixhawk 2.4.8 now:
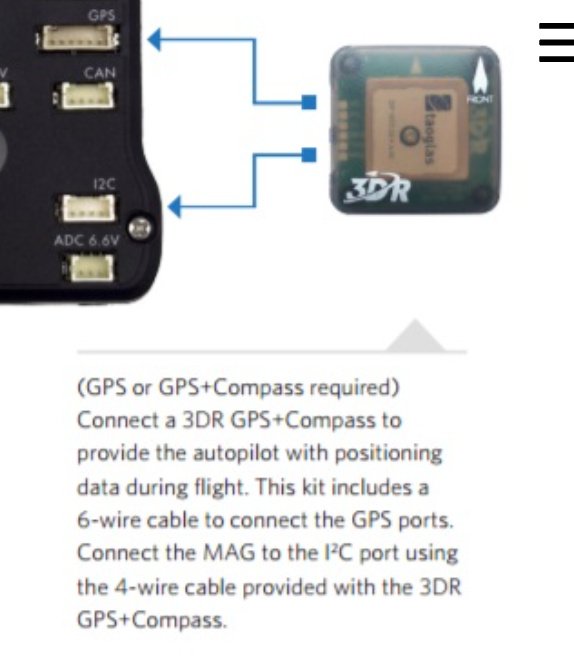
First thing I realized that there weren’t any GPS modules in the package I have. Do I need one for the drone to fly? On its official site, it says it’s “Required” but I wanna make sure before I buy one.
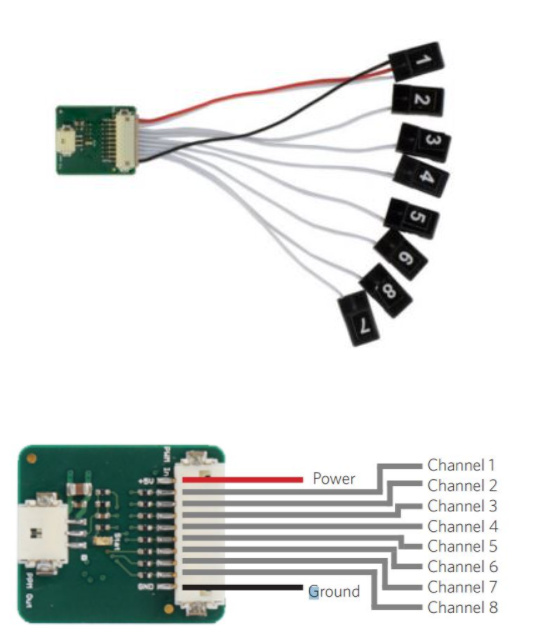
Next thing I realized it uses a PPM input instead of PWM and there is a “PPM encoder” in the package. But not sure how to connect it to the “Flysky Receiver FS-R6B” I have. With a little research, I found that it doesn’t matter how I connect it?? but I am probably wrong about this? I am a little confused but here is what I found:
I don’t wanna burn anything so I wanna make sure before I power everything up with a LiPo.
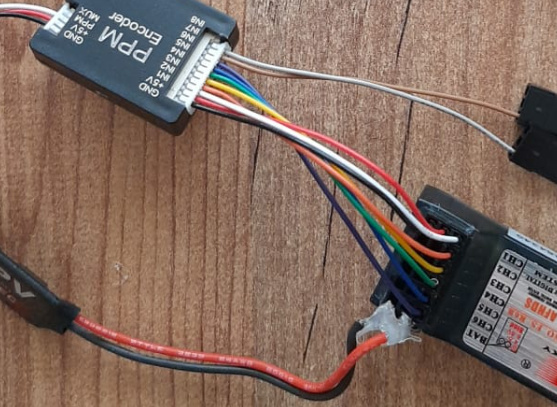
Here are my connections with the PPM encoder:
Lastly, when I connect it to the mission planner I get many options but no “Pixhawk 2.4.8”:

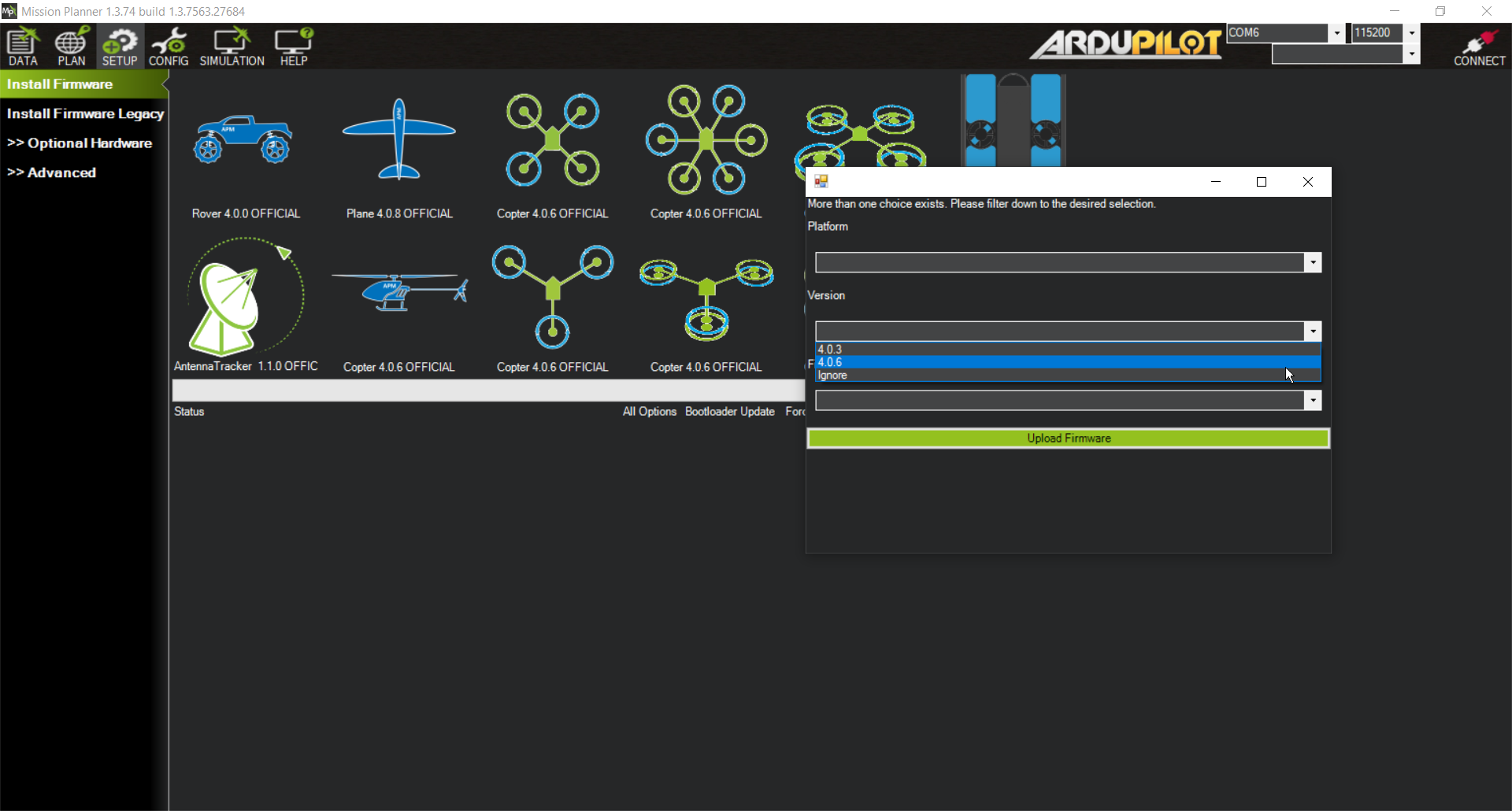
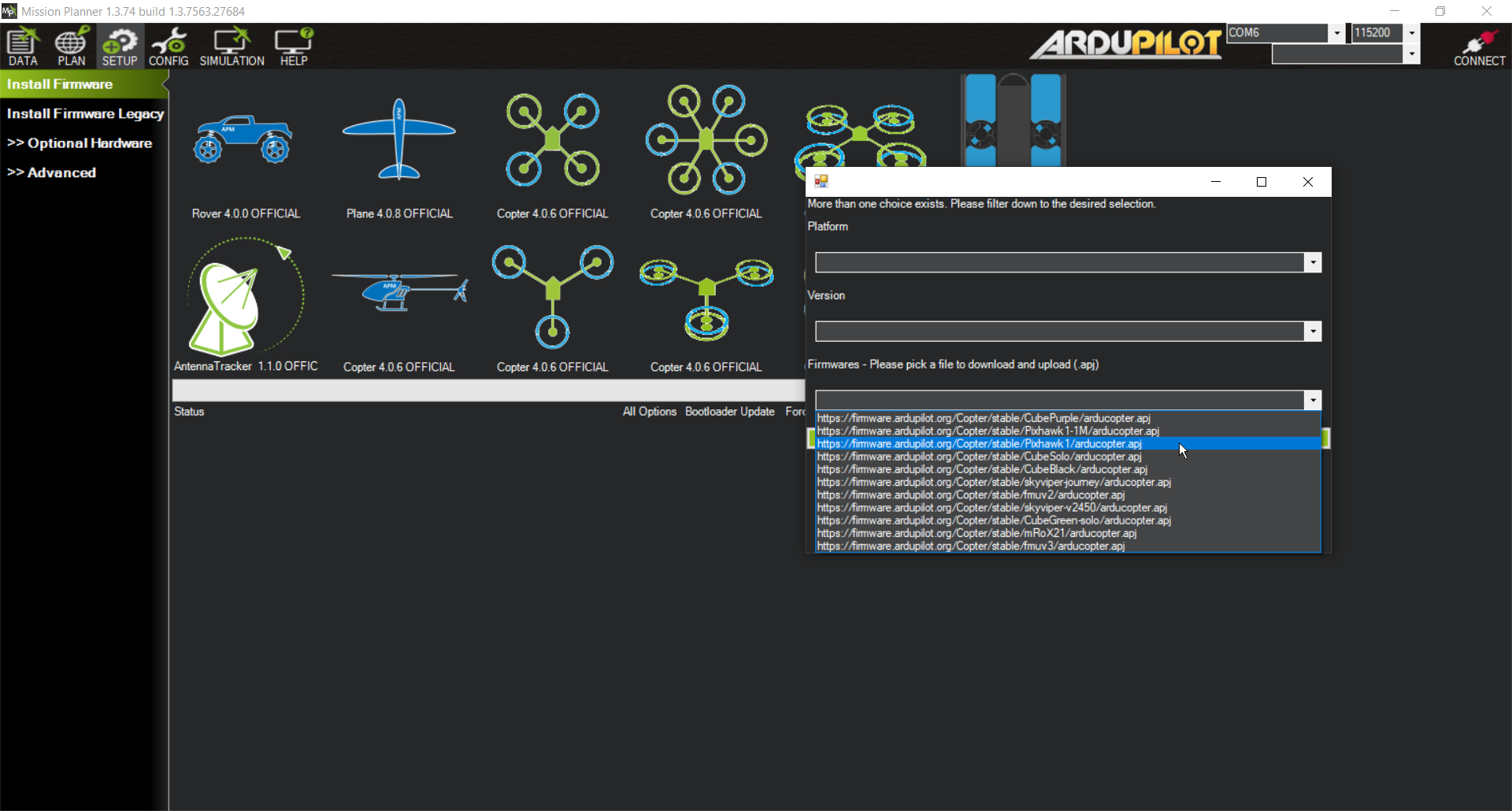
I tried to follow these steps like my old APM2.6 but it was different from what the official site shows me:
I assume I need to choose either “Pixhawk 1” or “Pixhawk 1-1M” but I am not sure which one, also which version do I choose? 4.0.3 or 4.0.6, or do I just ignore it, all the videos I found are different, they just click firmware and it installs for them, unlike mine.
select fmuv2 instead of pixhawk1
and 4.0.6
I also tried to calibrate again with “Pixhawks” with Pixhawk 1, 4.0.6 settings and again it didn’t work:
Radio calibration:
ESC calibration:
tried the same things with that firmware but the same result.
no idea what is wrong,
as if all of the flight controllers I bought are broken
motors never spin unless I send direct pwm commands with an Arduino
The ESC will not initialize with the low end throttle value shown in that radio calibration video (1128). It’s too high. You probably have something setup wrong in the Transmitter or it’s that PWM/PPM converter. I haven’t seen anyone use one of those in awhile. I’m sure there is noting wrong with the Flight Controller.
Is it possible that I messed up the connections from the receiver to the PPM encoder ?
My connections were up top, do I need specific Connections? or can I do it randomly?
Encoder just says
GND,5V, IN2,IN3 … IN8
While my receiver says
BAT, CH6,CH5…CH1
not sure which is which and how to connect them. Pixhawk responds when I turn off/on my transmitter and I can see red light appear on my receiver when I turn on my transmitter + all those values I setup. Not sure what could go wrong other then the wiring while “calibrating the radio” ? any ideas ?
No, you can’t do that. It looks like you have it right. Rx chan 1 out to encoder 1 in and so on. But the throttle values shown on the Radio Calivration screen don’t look right (1126-1818). The other chanells do. I don’t know anything about that transmitter, check the outputs configuration.
I played around with the “trim wheels” (not sure what to call them) and got them to these values but nothing changed:

I read the “manual” before but it didn’t tell me anything useful, (or I don’t know what I’m supposed to look for):
https://fccid.io/N4ZFLYSKYT4B/User-Manual/User-manual-part-I-1696520
If you are talking about the trim sliders on the Transmitter those need to be centered and never touched for any reason whatsoever for a multirotor (plane is different).
Not much of a manual.
So after messing around with the trim sliders I got this at lower 1067 high 1800~:
There is a different sounding extra “beep” but nothing else changed
Sooooo, if I get another transmitter would that solve my problem?
Why the f. not, like, I bought at least 3 versions of motors/ESC’s/flight controllers and some other equipment by now… why not do the same for transmitters and receivers!!!
At this point, I regret trying to build a drone but I have to finish what I started. Do you guys think if I get another transmitter/receiver it would solve my problem? If so which one should I get?
Frankly you should be able to get a Arducopter/Pixhawk quad flying with any 6 chan radio. Personally I wouldn’t use a radio that didn’t run OpenTx. The best budget option for that is probably the Radiomaster TX12. Along with these radios come a bit of a learning curve but you should be able to get it configured and bound to a cheap Rx, which you will also have to buy,easily enough.
1 Like
I will try to get my “transmitter” checked on my “trusty” hobby shop, as them if it’s working properly.
If I can’t get it working I will get a new receiver and transmitter.
Thank you
Even just get a reciever that outputs all RC channels on one RC output and do away with that converter. It will have to be a reciever that works witb your transmitter. And make sure the transmitter is not in Helicopter mode or something weird.
Is that a 4chan transmitter? You know where it says Channels FOUR on the front to the right of FS-T4B? That won’t work for Arducopter anyway. Ask at that Hobby Shop what channel to use for Flight Modes. That should be comical.
BTW-I have a really nice local Hobby Shop 5 miles from my house. It’s large, well stocked and the people working there are nice to deal with. But they are Clueless when it comes to DIY Multirotors. I ask, they say they don’t know know, and I smile and go look around for what I want. I know what to expect, it’s not a big deal, happy to give them my money. Have a question about an RC Car or a Plane (without Flight Controllers) and they will have the answer and the parts.